使用直流电流控制扭矩
这个控制环允许你将无刷直流电机当作电流控制的直流电机来运行。这种扭矩控制算法需要电流传感硬件。用户设置目标电流\(I_d\),FOC算法计算出必要的相电压\(u_a\)、\(u_b\)和\(u_c\)以维持该电流。启用此模式的方式为:
// DC current torque control mode
motor.torque_controller = TorqueControlType::dc_current;
其具体工作原理
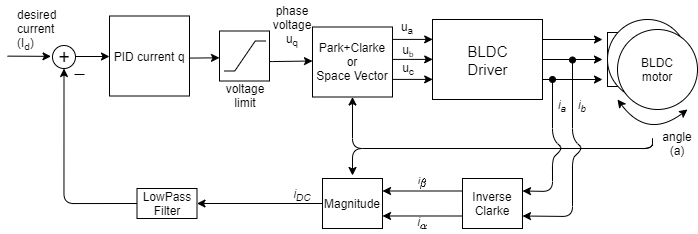

直流电流扭矩控制算法读取步进电机的相电流(\(i_a\) 和 \(i_b\))。相电流通过逆克拉克变换转换为电流\(i_\alpha\) 和 \(i_\beta\)。 例如,如果测量到相电流\(i_a\) 和 \(i_b\):
\[i_\alpha = i_a, \quad i_\beta =i_a\frac{1}{\sqrt{3}} + i_b\frac{2}{\sqrt{3}}\]然后我们可以计算电机测得的电流大小为
\[i_{DC} = \sqrt{i_\alpha^2 + i_\beta^2}\]由于这个大小不包含电流方向(正或负)的信息,我们需要利用电流的符号来确定电流方向。计算电流符号最简单的方法是使用电流矢量的\(i_q\)分量的符号,我们可以通过使用当前角度\(a\)的帕克变换来计算\(i_q\)。
\[i_q = i_\beta \cos(a) - i_\alpha\sin(a)\]最后,直流电流\(i_{DC}\)被计算为电流矢量\(i_q\)的大小。
\[i_{DC} = \text{sign}(i_q)\cdot\sqrt{i_\alpha^2 + i_\beta^2}\]PID 控制器使用目标电流值\(I_d\) 和测得的\(i_{DC}\)计算要设置给电机的适当电压\(U_q\)。
\[U_q = \text{PID}(I_d - i_{DC})\]而\(U_d\) 保持为 0。
\[U_d = 0\]最后,扭矩控制算法找到产生计算出的\(U_q\)和\(U_d\)电压的适当电压\(u_a\)、\(u_b\)和\(u_c\)。这是通过帕克 + 克拉克(或空间矢量)变换完成的。
注意
这种扭矩控制模式的假设是,电机产生的扭矩与电机消耗的直流电流\(i_{DC}\) 成正比 (\(i_{DC}\) = \(i_q\))。因此,通过控制该电流,用户可以控制扭矩值。这个假设只在低速度下成立,在较高速度下,电流的\(i_d\) 分量会变大,\(i_{DC}\)=\(i_q\) 不再成立。
配置参数
为了使这个控制环平稳运行,用户需要配置PID_current_q的 PID 控制器参数和低通滤波器LPF_current_q的时间常数。
// PID parameters - default
motor.PID_current_q.P = 5; // 3 - Arduino UNO/MEGA
motor.PID_current_q.I = 1000; // 300 - Arduino UNO/MEGA
motor.PID_current_q.D = 0;
motor.PID_current_q.limit = motor.voltage_limit;
motor.PID_current_q.ramp = 1e6; // 1000 - Arduino UNO/MEGA
// Low pass filtering - default
LPF_current_q.Tf= 0.005; // 0.01 - Arduino UNO/MEGA
扭矩控制示例代码
一个使用内置电流传感器的基于直流电流的扭矩控制简单示例,并通过串行命令接口设置目标值。
#include <SimpleFOC.h>
// BLDC motor & driver instance
BLDCMotor motor = BLDCMotor(11);
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 8);
// encoder instance
Encoder encoder = Encoder(2, 3, 500);
// channel A and B callbacks
void doA(){encoder.handleA();}
void doB(){encoder.handleB();}
// current sensor
InlineCurrentSense current_sense = InlineCurrentSense(0.01, 50.0, A0, A2);
// instantiate the commander
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&motor.target, cmd); }
void setup() {
// initialize encoder sensor hardware
encoder.init();
encoder.enableInterrupts(doA, doB);
// link the motor to the sensor
motor.linkSensor(&encoder);
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 12;
driver.init();
// link driver
motor.linkDriver(&driver);
// link the driver to the current sense
current_sense.linkDriver(&driver);
// current sense init hardware
current_sense.init();
// link the current sense to the motor
motor.linkCurrentSense(¤t_sense);
// set torque mode:
motor.torque_controller = TorqueControlType::dc_current;
// set motion control loop to be used
motor.controller = MotionControlType::torque;
// foc current control parameters (Arduino UNO/Mega)
motor.PID_current_q.P = 5;
motor.PID_current_q.I= 300;
motor.LPF_current_q.Tf = 0.01;
// use monitoring with serial
Serial.begin(115200);
// comment out if not needed
motor.useMonitoring(Serial);
// initialize motor
motor.init();
// align sensor and start FOC
motor.initFOC();
// add target command T
command.add('T', doTarget, "target current");
Serial.println(F("Motor ready."));
Serial.println(F("Set the target current using serial terminal:"));
_delay(1000);
}
void loop() {
// main FOC algorithm function
motor.loopFOC();
// Motion control function
motor.move();
// user communication
command.run();
}