SimpleFOCStudio 作者:@JorgeMaker
SimpleFOC库的图形用户界面。该应用程序允许通过串口通信和Commander接口,对任何由SimpleFOC库控制的BLDC/步进电机设备进行调谐和配置。
功能特点:
- 与SimpleFOC库2.1+版本即插即用
- 电机的实时调谐和配置
- 电机变量的实时绘图和监控
- 代码生成功能,便于将调谐好的参数集成到你的代码中
- 基于PyQt5构建,并采用标准化的
SimpleFOCConnector接口,可作为从Python到SimpleFOC库设备的网关。
安装
别担心,即使你从未使用过终端,SimpleFOCStudio的安装也很简单!😃 只需几个步骤:
- 如果尚未安装Python,请先安装
- 我们建议使用Anaconda。安装方法如下。
- 当Anaconda安装完成后,打开终端(Windows系统用anaconda prompt)并运行:
conda create -n simplefoc python=3.6.0 - 完成后,以后就无需再运行该命令,只需执行:
conda activate simplefoc
- 克隆此仓库或下载 zip 文件
- 使用终端进入包含仓库的文件夹
- 命令大致如下:
cd some_path_on_disk/SimpleFOCStudio
- 命令大致如下:
- 安装的最后一步是安装SimpleFOCStudio所需的所有必要库:
pip install -r "requirements.txt"
完成上述所有步骤后,无需重复操作。下次使用时,只需在终端中进入SimpleFOCStudio目录并运行以下命令:
python simpleFOCStudio.py
如果使用 Anaconda:
conda activate simplefoc
python simpleFOCStudio.py
SimpleFOCStudio的使用
SimpleFOCStudio 有几个实用功能:
- 一种简单的电机设置调谐方法
- 表单视图(Form view)用于快速进行运动控制 PID/LPF 调谐
- 树状视图(TreeView)用于更深入的调谐和试验
- 代码生成功能,用于将找到的参数传输到你的 Arduino 代码中
- 集成了各种 commander 功能的串口终端
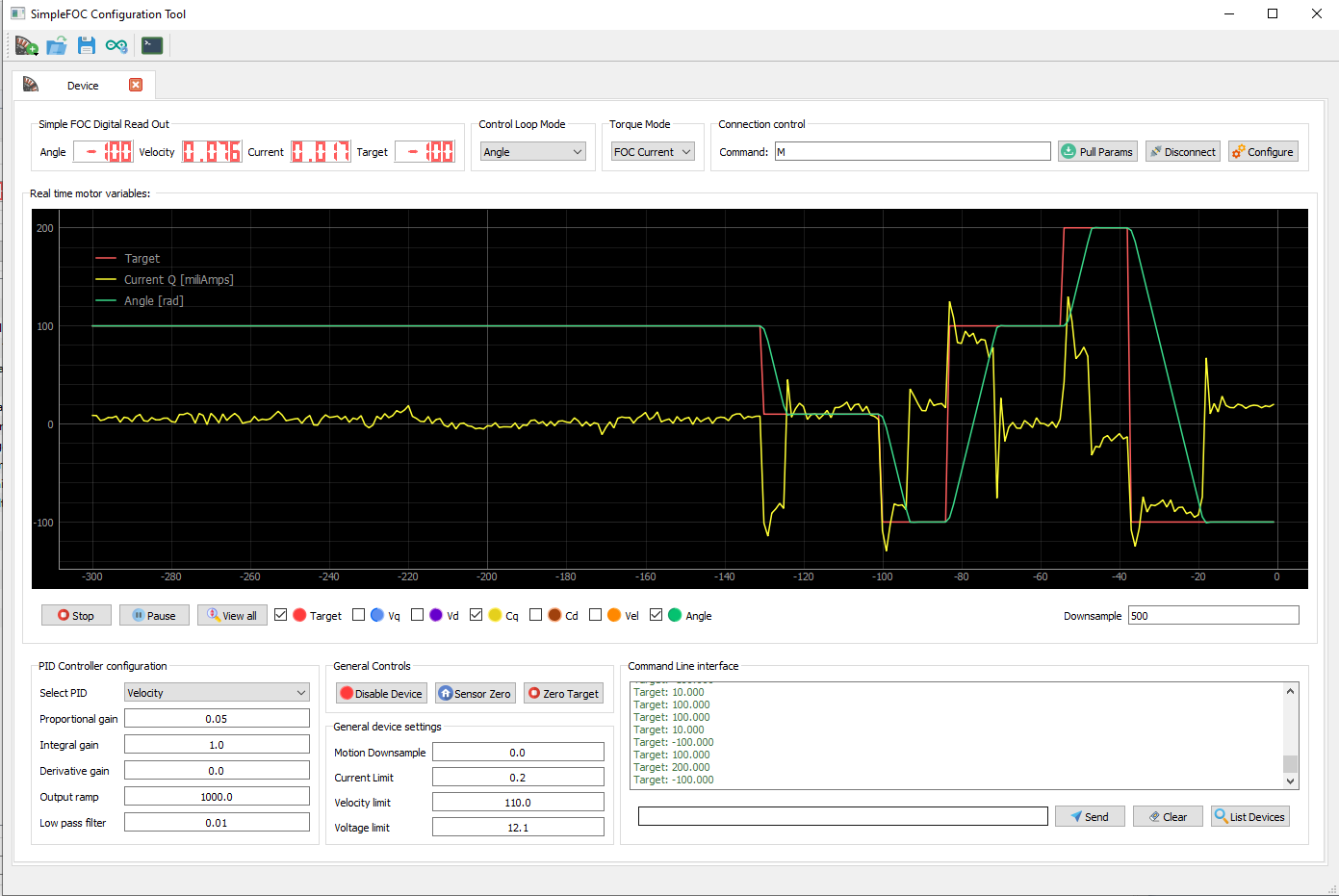
运动控制调谐窗口
应用程序运行后,点击工具栏中的 电机按钮添加设备。你可以选择
电机按钮添加设备。你可以选择 树状视图或
树状视图或 表单视图。
表单视图。
- 要连接设备,首先点击
 配置按钮配置串口
配置按钮配置串口 - 输入串口信息并点击确定
- 然后添加你在 commander 中设置的设备命令 ID,通常是
M- 命令
M对应的 Arduino 代码command.add('M',doMotor,"my motor") - 命令
A对应的 Arduino 代码command.add('A',doMotor,"my motor")
- 命令
然后点击
 连接按钮,就可以开始使用了!
连接按钮,就可以开始使用了!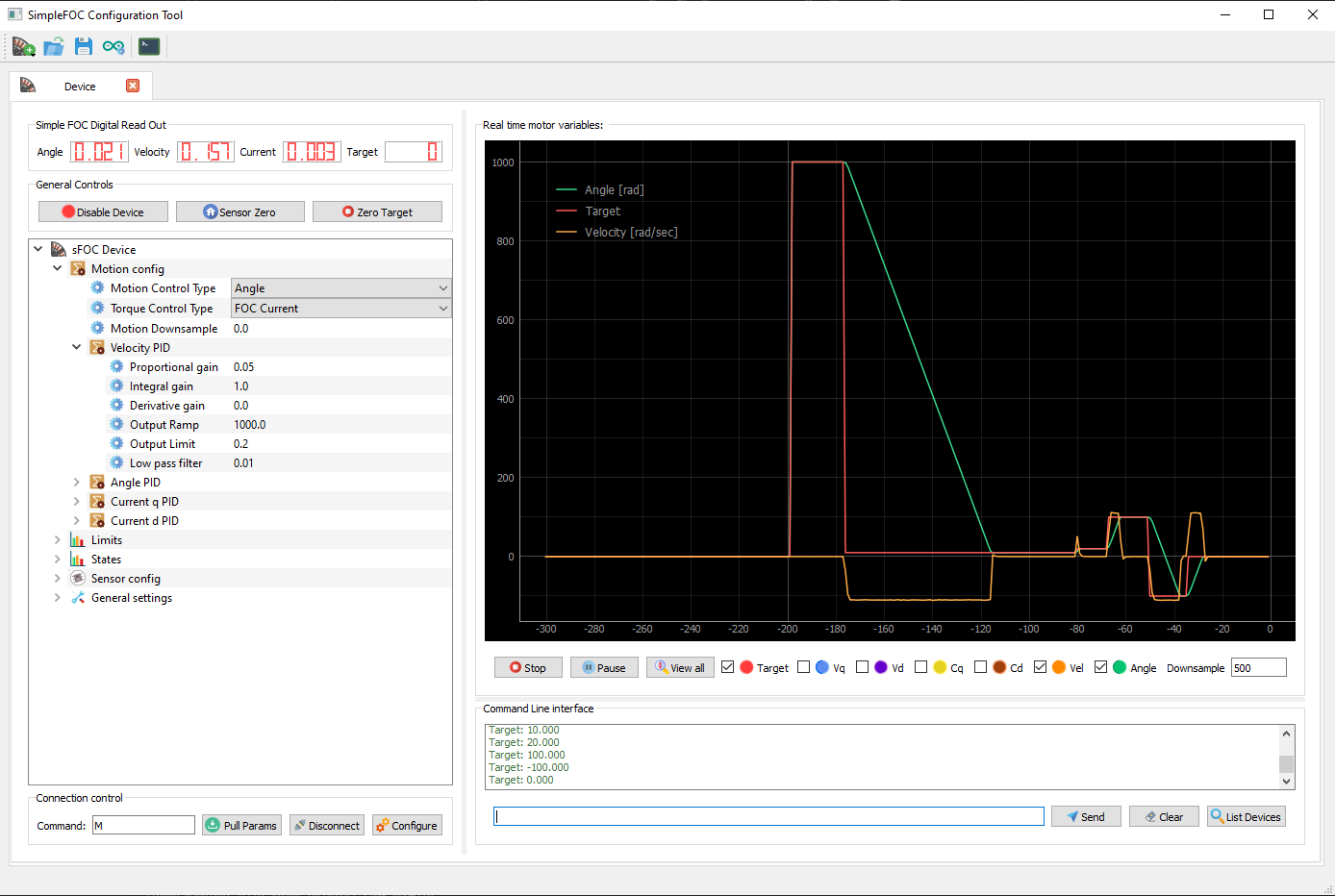
代码生成
SimpleFOCStudio帮助你更轻松地将精心调谐的参数传输到 Arduino 代码中。当你对系统性能满意后,可以自动生成已调谐参数的 Arduino 代码。生成代码的步骤:
- 点击工具栏中的
 Arduino 按钮。
Arduino 按钮。 - 选择你想要生成代码的参数集,然后点击确定
- 在新标签页中,你将看到已调谐参数的代码。
生成的代码可以直接复制粘贴到setup()函数中,放在调用motor.init()之前。
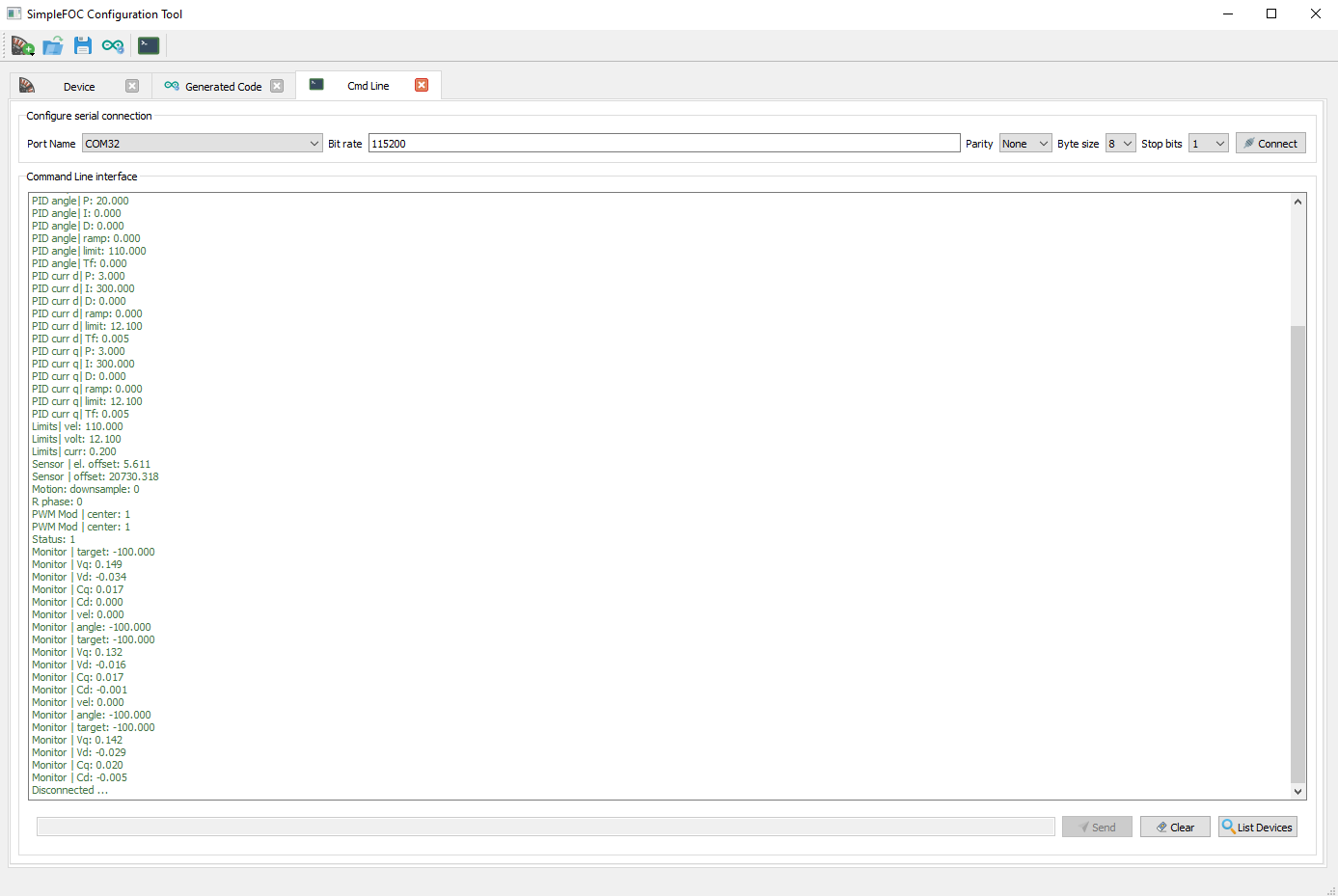
集成串口终端
SimpleFOCStudio 还集成了串口终端,方便调试和监控。
Arduino代码
基本上你需要做两件事:
- 使用 commander 接口并将电机添加到 commander 中
- 使用监控功能,并在循环中添加
motor.monitor()
以下是代码示例:
#include <SimpleFOC.h>
....
// include commander interface
Commander command = Commander(Serial);
void doMotor(char* cmd) { command.motor(&motor, cmd); }
void setup(){
....
// add the motor to the commander interface
// The letter (here 'M') you will provide to the SimpleFOCStudio
command.add('M',doMotor,'motor');
// tell the motor to use the monitoring
motor.useMonitoring(Serial);
motor.monitor_downsample = 0; // disable monitor at first - optional
...
}
void loop(){
....
....
// real-time monitoring calls
motor.monitor();
// real-time commander calls
command.run();
}