FOC算法实现 v1.6
由于SimpleFOClibrary旨在用于FOC算法的教学以及支持各种应用,因此该库中实现了两种(实际上是两种半)FOC调制版本。在这里,我想向您解释该库中FOC实现的大部分细节,以便您更好地了解其内部工作原理,以及如何对其进行修改和调整以适应您的应用。
FOC算法有三个主要组成部分:
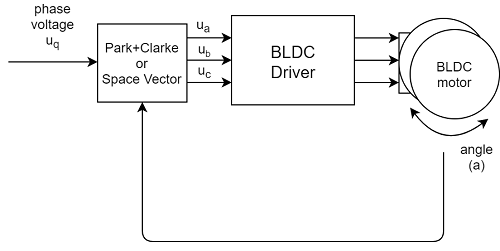
- 相电压计算算法(调制):
setPhaseVoltage() - 电机和传感器校准:
initFOC() - 实时执行:
loopFOC()
现在让我们讨论所有这三个组件的实现细节!
❤️ FOC核心函数:设置相电压 setPhaseVoltage()
SimpleFOClibrary实现了两种类型的FOC PWM调制。 所实现的调制算法有:
- 正弦PWM:
SinePWM - 空间矢量PWM:
SpaceVectorPWM
您可以通过设置motor.foc_modulation变量的值来配置它们:
motor.foc_modulation = FOCModulationType::SinePWM; // default
// or
motor.foc_modulation = FOCModulationType::SpaceVectorPWM;
注意:
有关FOC算法理论的更多信息,请访问FOC理论角。
这两种调制类型和相电压计算在setPhaseVoltage()函数中完全实现。
void BLDCMotor::setPhaseVoltage(float Uq, float angle_el) {
switch (foc_modulation)
{
case FOCModulationType::SinePWM :
// Sinusoidal PWM modulation
// Inverse Park + Clarke transformation
// angle normalization in between 0 and 2pi
// only necessary if using _sin and _cos - approximation functions
angle_el = normalizeAngle(angle_el + zero_electric_angle);
// Inverse park transform
Ualpha = -_sin(angle_el) * Uq; // -sin(angle) * Uq;
Ubeta = _cos(angle_el) * Uq; // cos(angle) * Uq;
// Clarke transform
Ua = Ualpha + voltage_power_supply/2;
Ub = -0.5 * Ualpha + _SQRT3_2 * Ubeta + voltage_power_supply/2;
Uc = -0.5 * Ualpha - _SQRT3_2 * Ubeta + voltage_power_supply/2;
break;
case FOCModulationType::SpaceVectorPWM :
// Nice video explaining the SpaceVectorModulation (SVPWM) algorithm
// https://www.youtube.com/watch?v=QMSWUMEAejg
// if negative voltages change inverse the phase
// angle + 180degrees
if(Uq < 0) angle_el += _PI;
Uq = abs(Uq);
// angle normalisation in between 0 and 2pi
// only necessary if using _sin and _cos - approximation functions
angle_el = normalizeAngle(angle_el + zero_electric_angle + _PI_2);
// find the sector we are in currently
int sector = floor(angle_el / _PI_3) + 1;
// calculate the duty cycles
float T1 = _SQRT3*_sin(sector*_PI_3 - angle_el) * Uq/voltage_power_supply;
float T2 = _SQRT3*_sin(angle_el - (sector-1.0)*_PI_3) * Uq/voltage_power_supply;
// two versions possible
// centered around voltage_power_supply/2
float T0 = 1 - T1 - T2;
// pulled to 0 - better for low power supply voltage
//float T0 = 0;
// calculate the duty cycles(times)
float Ta,Tb,Tc;
switch(sector){
case 1:
Ta = T1 + T2 + T0/2;
Tb = T2 + T0/2;
Tc = T0/2;
break;
case 2:
Ta = T1 + T0/2;
Tb = T1 + T2 + T0/2;
Tc = T0/2;
break;
case 3:
Ta = T0/2;
Tb = T1 + T2 + T0/2;
Tc = T2 + T0/2;
break;
case 4:
Ta = T0/2;
Tb = T1+ T0/2;
Tc = T1 + T2 + T0/2;
break;
case 5:
Ta = T2 + T0/2;
Tb = T0/2;
Tc = T1 + T2 + T0/2;
break;
case 6:
Ta = T1 + T2 + T0/2;
Tb = T0/2;
Tc = T1 + T0/2;
break;
default:
// possible error state
Ta = 0;
Tb = 0;
Tc = 0;
}
// calculate the phase voltages and center
Ua = Ta*voltage_power_supply;
Ub = Tb*voltage_power_supply;
Uc = Tc*voltage_power_supply;
break;
}
// set the voltages in hardware
setPwm(Ua, Ub, Uc);
}
电机和传感器校准 initFOC()
为了能够在定子和转子之间产生精确的90度磁场,我们不仅需要知道传感器的确切绝对位置,还需要知道该(传感器)位置对电机电角度的意义。因此,在使用FOC算法设置相电压之前,我们需要将电机电角度0与传感器角度0对齐。
该过程在下图中进行了解释。
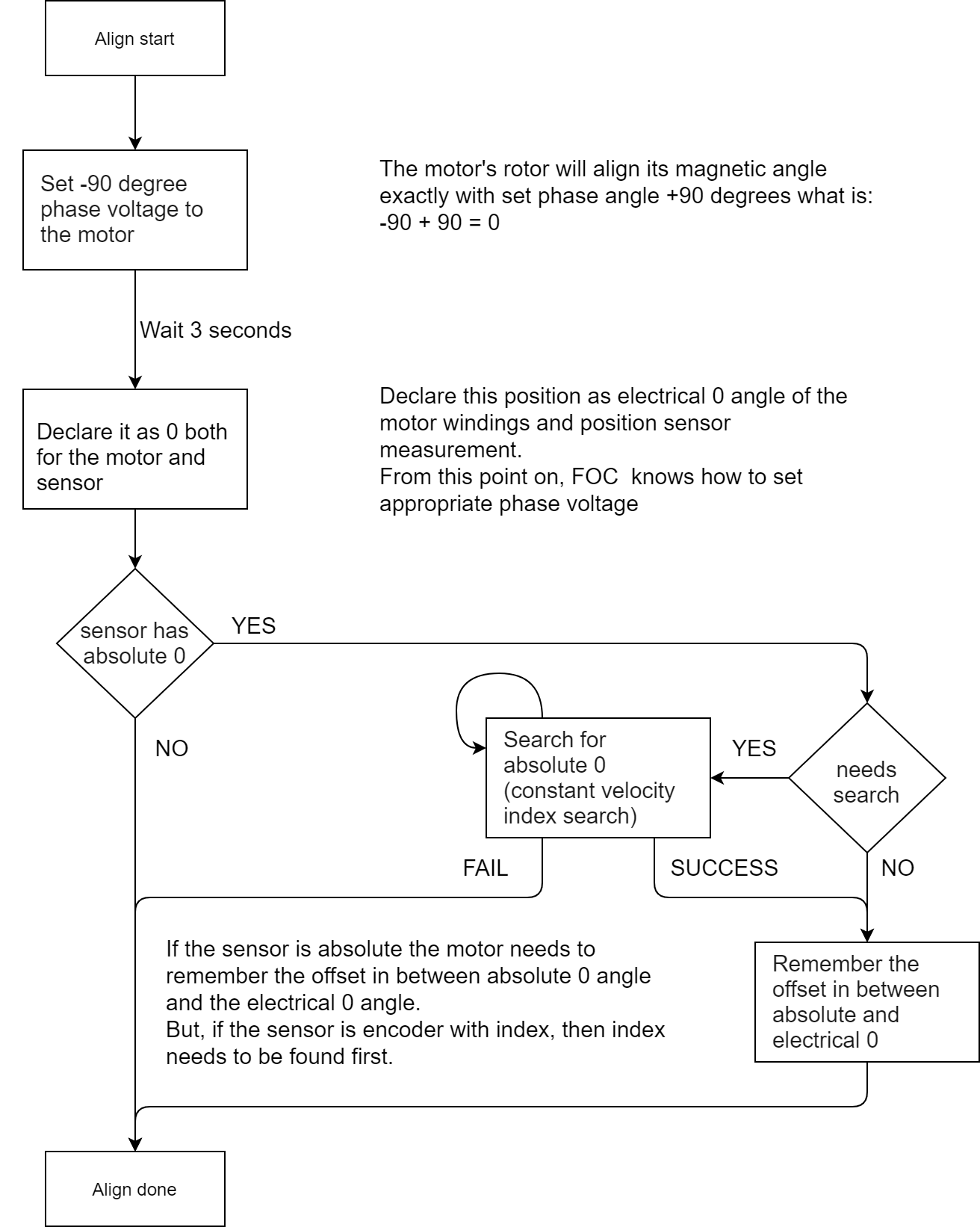
所有这些都在我们调用initFOC()函数时发生。
// Function initializing FOC algorithm
// and aligning sensor's and motors' zero position
// - If zero_electric_offset parameter is set the alignment procedure is skipped
//
// - zero_electric_offset - value of the sensors absolute position electrical offset in respect to motor's electrical 0 position.
// - sensor_direction - sensor natural direction - default is CW
//
int BLDCMotor::initFOC( float zero_electric_offset = NOT_SET , Direction sensor_direction = Direction::CW) {
int exit_flag = 1;
// align motor if necessary
// alignment necessary for encoders!
if(zero_electric_offset != NOT_SET){
// absolute zero offset provided - no need to align
zero_electric_angle = zero_electric_offset;
// set the sensor direction - default CW
sensor->natural_direction = sensor_direction;
}else{
// sensor and motor alignment
_delay(500);
exit_flag = alignSensor();
_delay(500);
}
if(monitor_port) monitor_port->println("MOT: Motor ready.");
return exit_flag;
}
电机和传感器角度的初始校准在alignSensor()函数中实现:
// Encoder alignment to electrical 0 angle
int BLDCMotor::alignSensor() {
if(monitor_port) monitor_port->println("MOT: Align sensor.");
// align the electrical phases of the motor and sensor
float start_angle = shaftAngle();
for (int i = 0; i <=5; i++ ) {
float angle = _3PI_2 + _2PI * i / 6.0;
setPhaseVoltage(voltage_sensor_align, angle);
_delay(200);
}
float mid_angle = shaftAngle();
for (int i = 5; i >=0; i-- ) {
float angle = _3PI_2 + _2PI * i / 6.0;
setPhaseVoltage(voltage_sensor_align, angle);
_delay(200);
}
if (mid_angle < start_angle) {
if(monitor_port) monitor_port->println("MOT: natural_direction==CCW");
sensor->natural_direction = Direction::CCW;
} else if (mid_angle == start_angle) {
if(monitor_port) monitor_port->println("MOT: Sensor failed to notice movement");
}
// set angle -90 degrees
// let the motor stabilize for 2 sec
_delay(2000);
// set sensor to zero
sensor->initRelativeZero();
_delay(500);
setPhaseVoltage(0,0);
_delay(200);
// find the index if available
int exit_flag = absoluteZeroAlign();
_delay(500);
if(monitor_port){
if(exit_flag< 0 ) monitor_port->println("MOT: Error: Not found!");
if(exit_flag> 0 ) monitor_port->println("MOT: Success!");
else monitor_port->println("MOT: Not available!");
}
return exit_flag;
}
而绝对角度校准在absoluteZeroAlign()函数中实现。
// Encoder alignment the absolute zero angle
// - to the index
int BLDCMotor::absoluteZeroAlign() {
if(monitor_port) monitor_port->println("MOT: Absolute zero align.");
// if no absolute zero return
if(!sensor->hasAbsoluteZero()) return 0;
if(monitor_port && sensor->needsAbsoluteZeroSearch()) monitor_port->println("MOT: Searching...");
// search the absolute zero with small velocity
while(sensor->needsAbsoluteZeroSearch() && shaft_angle < _2PI){
loopFOC();
voltage_q = velocityPID(velocity_index_search - shaftVelocity());
}
voltage_q = 0;
// disable motor
setPhaseVoltage(0,0);
// align absolute zero if it has been found
if(!sensor->needsAbsoluteZeroSearch()){
// align the sensor with the absolute zero
float zero_offset = sensor->initAbsoluteZero();
// remember zero electric angle
zero_electric_angle = normalizeAngle(electricAngle(zero_offset));
}
// return bool if zero found
return !sensor->needsAbsoluteZeroSearch() ? 1 : -1;
}
实时执行 loopFOC()
最后,剩下要做的就是运行实时FOC程序。代码需要获取电机位置(来自传感器),从中计算电角度(electricAngle()),并通过使用setPhaseVoltage()函数将所需电压(motor.voltage_q)设置到电机相上。
这就是代码中的实现方式!
// Function running FOC algorithm in real-time
// it calculates the gets motor angle and sets the appropriate voltages
// to the phase pwm signals
// - the faster you can run it the better Arduino UNO ~1ms, Bluepill ~ 100us
void BLDCMotor::loopFOC() {
// shaft angle
shaft_angle = shaftAngle();
// set the phase voltage - FOC heart function :)
setPhaseVoltage(voltage_q, electricAngle(shaft_angle));
}