使用焊接焊盘进行硬件配置
SimpleFOCShield v2
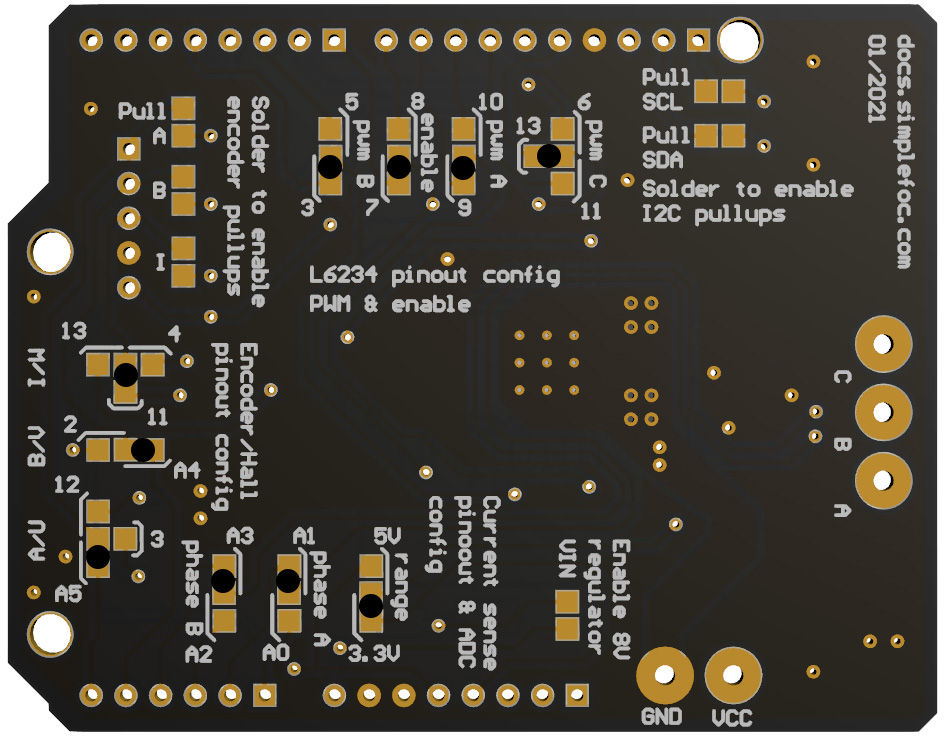
Arduino SimpleFOCShield 的一个非常重要的特性是硬件配置功能。
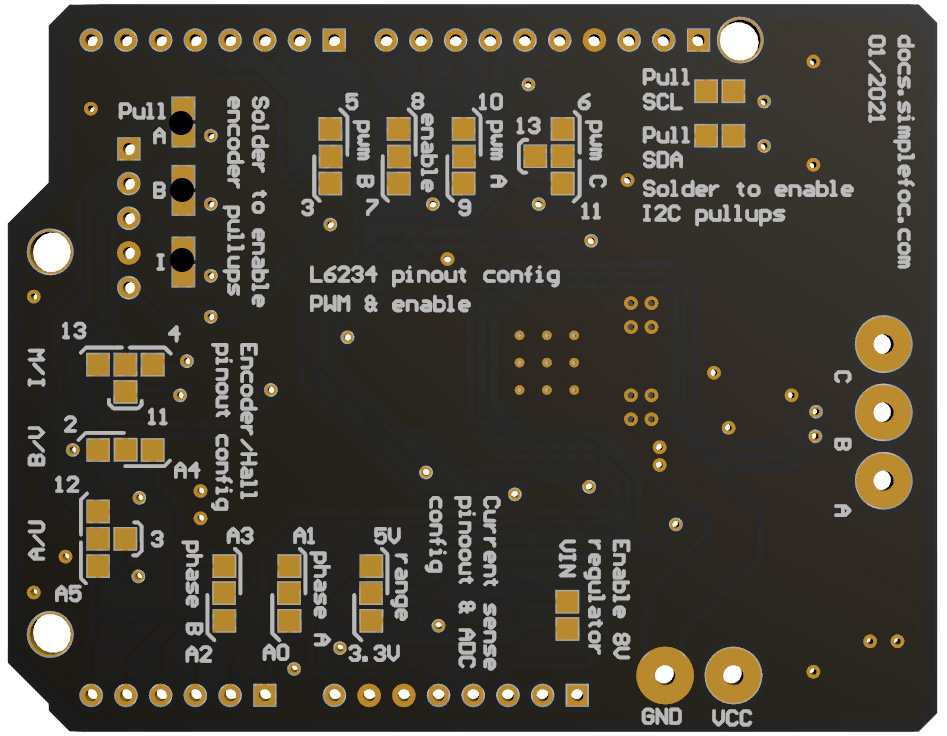
每个板的底部都有一组用于配置的焊接焊盘。这些焊接焊盘使板能够:
- 配置 BLDC 驱动器引脚(PWM 引脚 A、B、C 和使能引脚)- 了解更多..
- 启用/禁用编码器 A、B 和索引通道的上拉电阻 - 了解更多..
- 配置编码器/霍尔传感器连接 - 了解更多..
- 启用/禁用线性稳压器 - 了解更多..
- 配置 ADC 的范围 - 了解更多..
- 配置电流检测的引脚分配 - 了解更多..
注意 📢:导电墨水
许多 Arduino SimpleFOCShield 板在出厂前会进行初步测试,并以初始配置发货。测试配置是使用导电墨水而非焊接连接完成的。因此,当您收到板后,如果希望更改配置,只需用湿纸巾擦掉墨水即可。
启用编码器/霍尔传感器上拉电阻
每个板都集成了三组 3.3KOhm 上拉电阻,用于编码器通道 A、B 和索引(或霍尔传感器 U、V、W)。上图展示了如何焊接焊盘以启用上拉电阻。 并非所有编码器都需要上拉电阻,更准确地说,一般情况下,大多数编码器不需要。但对于那些追求价格优化的人来说 😊,很多便宜的 Ebay/Aliexpress 编码器会需要它们,例如 600P ebay 编码器 及类似产品。
启用I2C上拉电阻
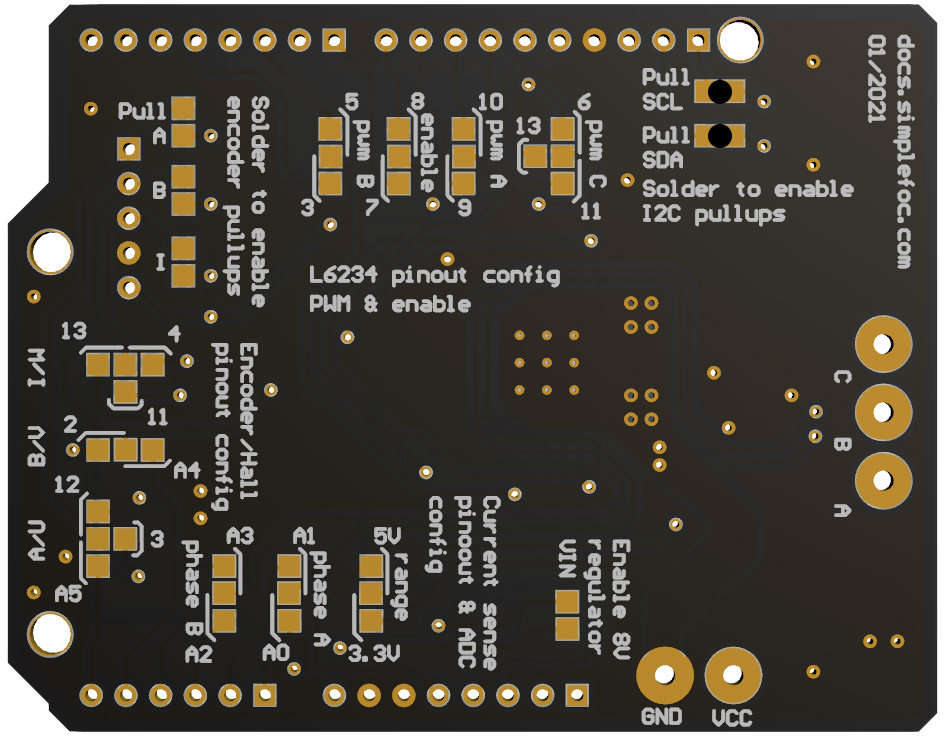
从 1.3.2 版本 开始,该板配备了 4.7KOhm 上拉电阻,用于 I2C 通信引脚。上图展示了如何焊接焊盘以启用上拉电阻。 并非所有 I2C 设备(特别是磁性传感器)都需要上拉电阻,更准确地说,一般情况下,大多数不需要,尤其是在 Arduino UNO 上。但在与 STM32 板(如 Nucleo-64)连接这些传感器时,经常会出现问题。这时,您需要启用上拉电阻或自行外接。
注意:堆叠使用
如果您要堆叠多个板且希望使用 I2C 上拉电阻,请确保一次只在一个板上焊接这些焊盘!
启用板载稳压器为微控制器供电

从 2.0 版本 开始,这些板集成了线性稳压器,以便通过板端子的电源为堆叠在其上的微控制器供电。v2.0.1 版本的板集成了 5V 稳压器,直接连接到板的 5V 引脚,可与所有 Arduino 板正常工作。但 stm32 Nucleo 不支持这种供电方式,因此仅通过焊接上图中的焊盘,v2.0.1 版本无法为 Nucleo-64 板供电。SimpleFOCShield 的 v2.0.2 版本具有 8V 稳压器,连接到板的 VIN 引脚,能够为 Nucleo-64 板供电。
注意:堆叠使用
如果您要堆叠多个板且希望使用线性稳压器,请确保只在一个板上启用它!
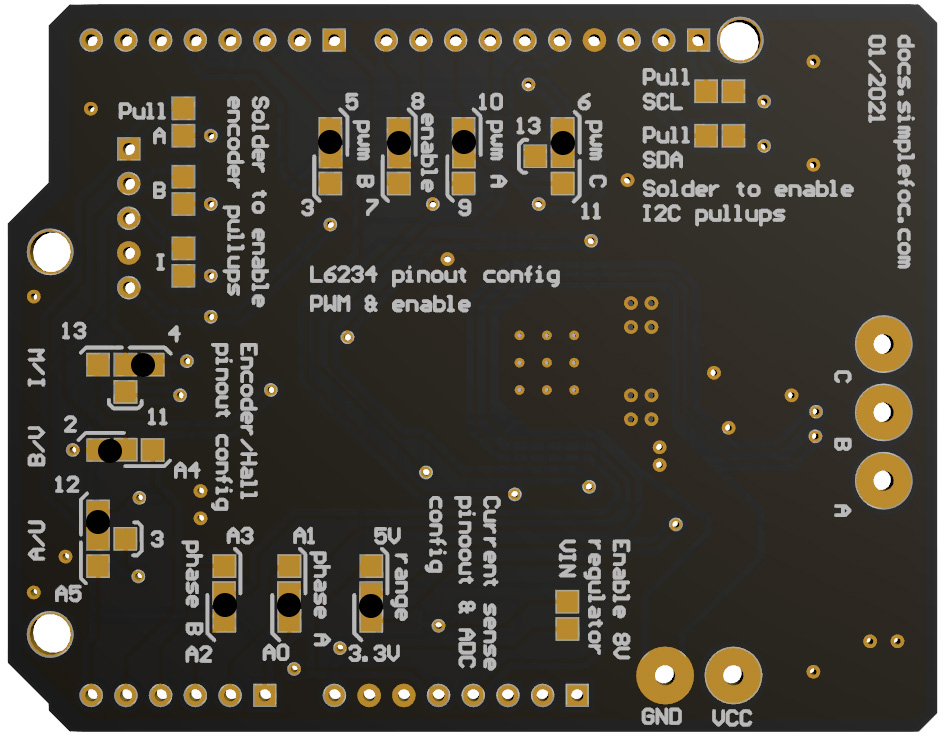
配置电流检测ADC范围
如果您的微控制器采用 5V 逻辑,其 ADC 很可能工作在 5V 范围;如果您的微控制器工作在 3.3V,则其 ADC 很可能为 3.3V 范围。焊接此焊盘前请查阅数据手册。如果 ADC 范围选择为 3.3V,可测量的最大电流为双向 3.3A;如果范围为 5V,最大电流为双向 5V。
经验法则:3.3V 或 5V
Arduino UNO - 5V 范围
stm32(nucleo、bluepill)和 esp32 芯片 - 3.3V 范围
配置电流检测引脚分配
电流检测的引脚分配非常简单,真正重要的是不要将相同的引脚用于其他用途。因此,如果堆叠多个板,请确保每个板使用的引脚对不与其他板冲突。
| 信号 | 可能的引脚 |
|---|---|
| 电流相 A | A0、A1 |
| 电流相 B | A2、A3 |
📢 若不确定使用哪些引脚,请查看我们的 ADC 引脚选择指南!
自定义引脚分配
SimpleFOCShield 的引脚分配自定义功能使该板在使用不同传感器和额外的 Arduino 模块时具有很高的灵活性。但更重要的是,它使该板能够堆叠使用。
以下是可配置信号及其可能的引脚分配表:
| 信号 | 可能的引脚 |
|---|---|
| Pwm A | 9、10 |
| Pwm B | 3、5 |
| Pwm C | 6、11、13 |
| 使能 | 7、8 |
| 编码器 A | 3、12、A5 |
| 编码器 B | 2、A4 |
| 编码器 I | 4、11、13 |
存在多种可能的引脚配置,但并非所有配置都适用于您所使用的微控制器和传感器。 例如,Arduino UNO 只有 2 个外部中断引脚,即引脚 2 和 3。因此,当将该板与 Arduino UNO 和编码器一起使用时,我们会尝试将引脚 3 用于编码器通道 A,而不是驱动器的 pwm A 引脚。
另一个例子是将两个板与 STM32 Nucleo 堆叠使用时。Nucleo 板不能在引脚 11 和 6 上生成 PWM,因此不能同时组合使用这些引脚。因此,使用 Nucleo 板时,经验法则是避免使用引脚 11,而使用引脚 13 代替。
📢 若不确定使用哪些引脚,请查看我们的 PWM 引脚选择指南!
因此,在以下内容中,您可以找到基于堆叠需求和所使用的微控制器的建议引脚分配配置。
建议的引脚分配:单块板
当仅使用一块板和一个电机时,选择引脚分配要容易得多。基本上,您只需要注意,如果使用编码器,要将引脚 3 用于编码器通道 A,而不是驱动器的 pwm A 引脚。此外,如果使用 SPI 磁性传感器,应避免使用引脚 10 和 11,因为它们用于 SPI 通信。
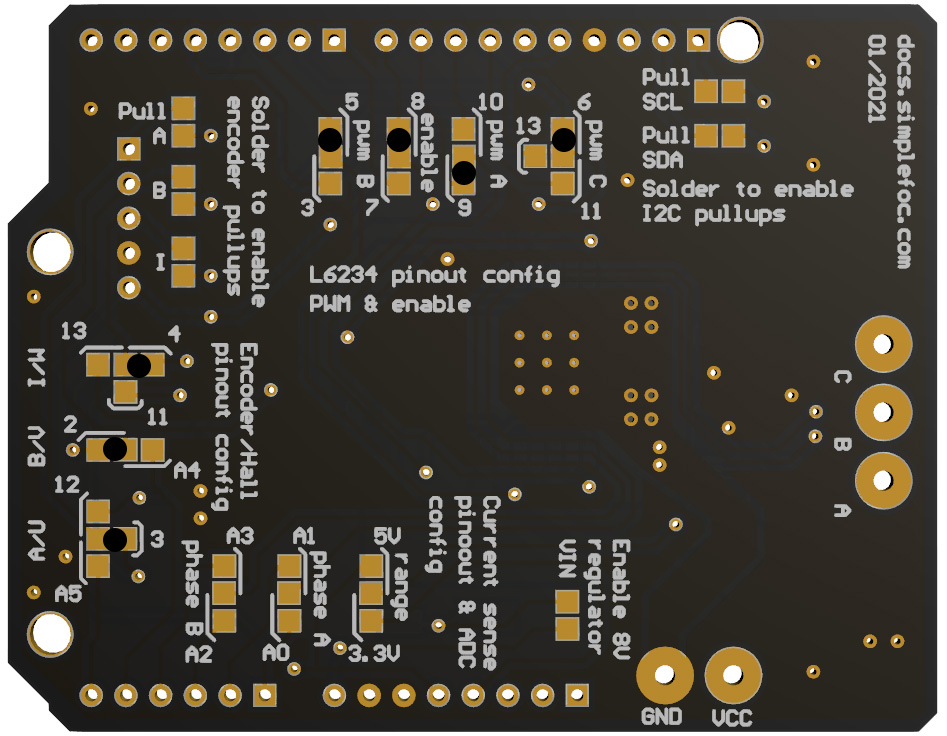
考虑到所有这些因素,使用一块板时,最佳的引脚分配可能如下:
| 信号 | Pwm A | Pwm B | Pwm C | 使能 | 编码器 A | 编码器 B | 编码器 I |
|---|---|---|---|---|---|---|---|
| 引脚号 | 9 | 5 | 6 | 8 | 3 | 2 | 4 |
在上图中,您可以看到为了获得此配置需要焊接哪些焊盘。
// 基于上述引脚分配的驱动器实例配置
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 8);
建议的引脚分配:与 Arduino UNO 堆叠使用
Arduino UNO 只有 6 个 PWM 引脚,这意味着当我们堆叠两块板时,可供选择的引脚不多,我们需要使用所有这些引脚。只要我们将引脚 3 用于 pwm A,并且不将引脚 13 用于 pwm C,那么如何安排 pwm A、B、C、使能和编码器 A、B、I 信号并不重要。 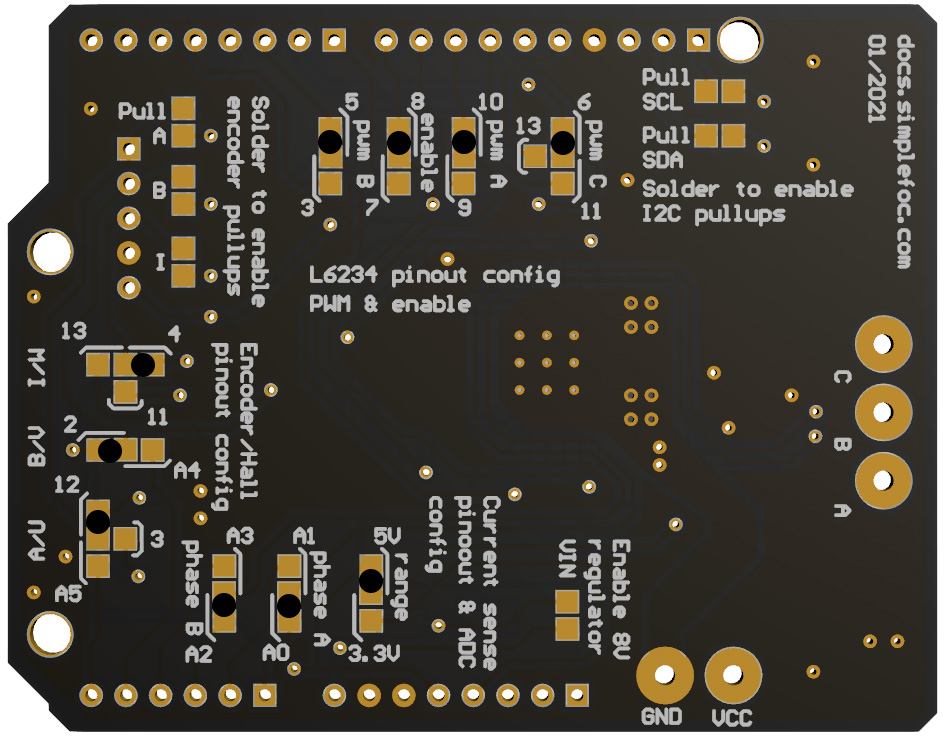
以下是一个与 Arduino UNO 兼容的引脚分配示例:
| 信号 | Pwm A | Pwm B | Pwm C | 使能 | 编码器 A | 编码器 B | 编码器 I |
|---|---|---|---|---|---|---|---|
| 板 #1 | 10 | 5 | 6 | 8 | 12 | 2 | 4 |
| 板 #2 | 9 | 3 | 11 | 7 | A5 | A4 | 13 |
上图展示了如何在两块板上焊接焊盘以获得所需的引脚分配。
// motor instances configuration based on pinout above
BLDCDriver3PWM driver1 = BLDCDriver3PWM(10, 5, 6, 8);
BLDCDriver3PWM driver2 = BLDCDriver3PWM(9, 3, 11, 7);
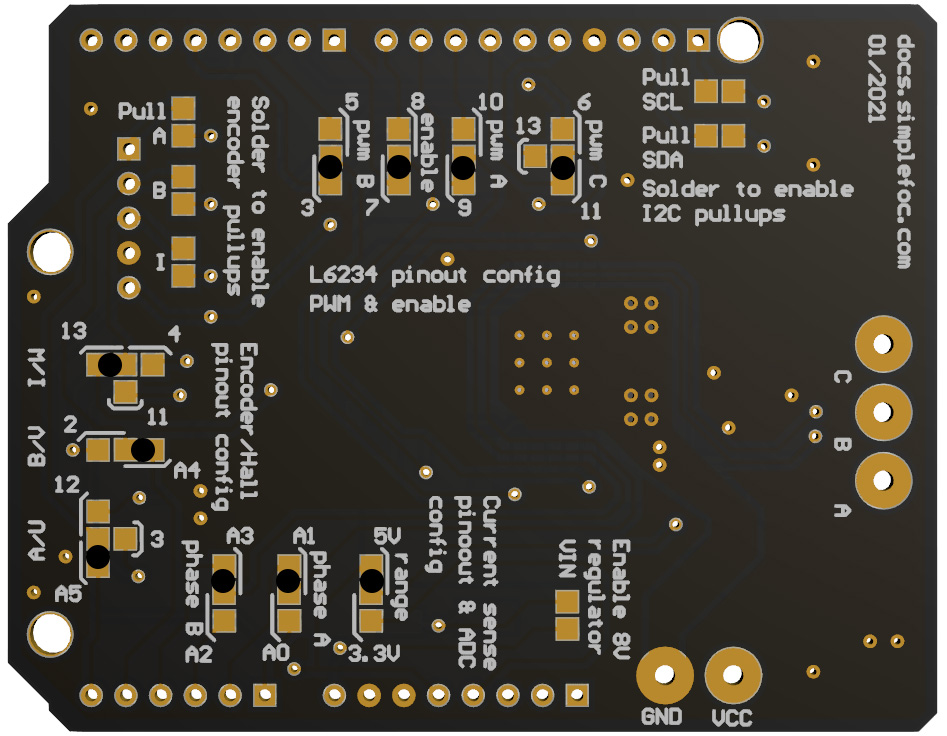
建议的引脚分配:与 Stm32 Nucleo 堆叠使用
当将堆叠的 SimpleFOCShield 与 stm32 Nucleo 板一起使用时,我们只需确保不将引脚 11 用于 pwm C,而是使用引脚 13 代替。对于 Arduino UNO,我们不应将引脚 3 用于编码器 A,而应用于 pwm A。但如果我们遵守这些限制,就可以随意选择其他引脚。
以下是一个适用于与 Nucleo 板堆叠使用的引脚分配配置示例。
| 信号 | Pwm A | Pwm B | Pwm C | 使能 | 编码器 A | 编码器 B | 编码器 I |
|---|---|---|---|---|---|---|---|
| 板 #1 | 10 | 5 | 6 | 8 | 12 | 2 | 4 |
| 板 #2 | 9 | 3 | 13 | 7 | A5 | A4 | 11 |
查看上图,了解如何焊接焊盘以获得此配置。
// motor instances configuration based on pinout above
BLDCDriver3PWM driver1 = BLDCDriver3PWM(10, 5, 6, 8);
BLDCDriver3PWM driver2 = BLDCDriver3PWM(9, 3, 13, 7);