霍尔传感器设置
步骤1. 实例化HallSensor类
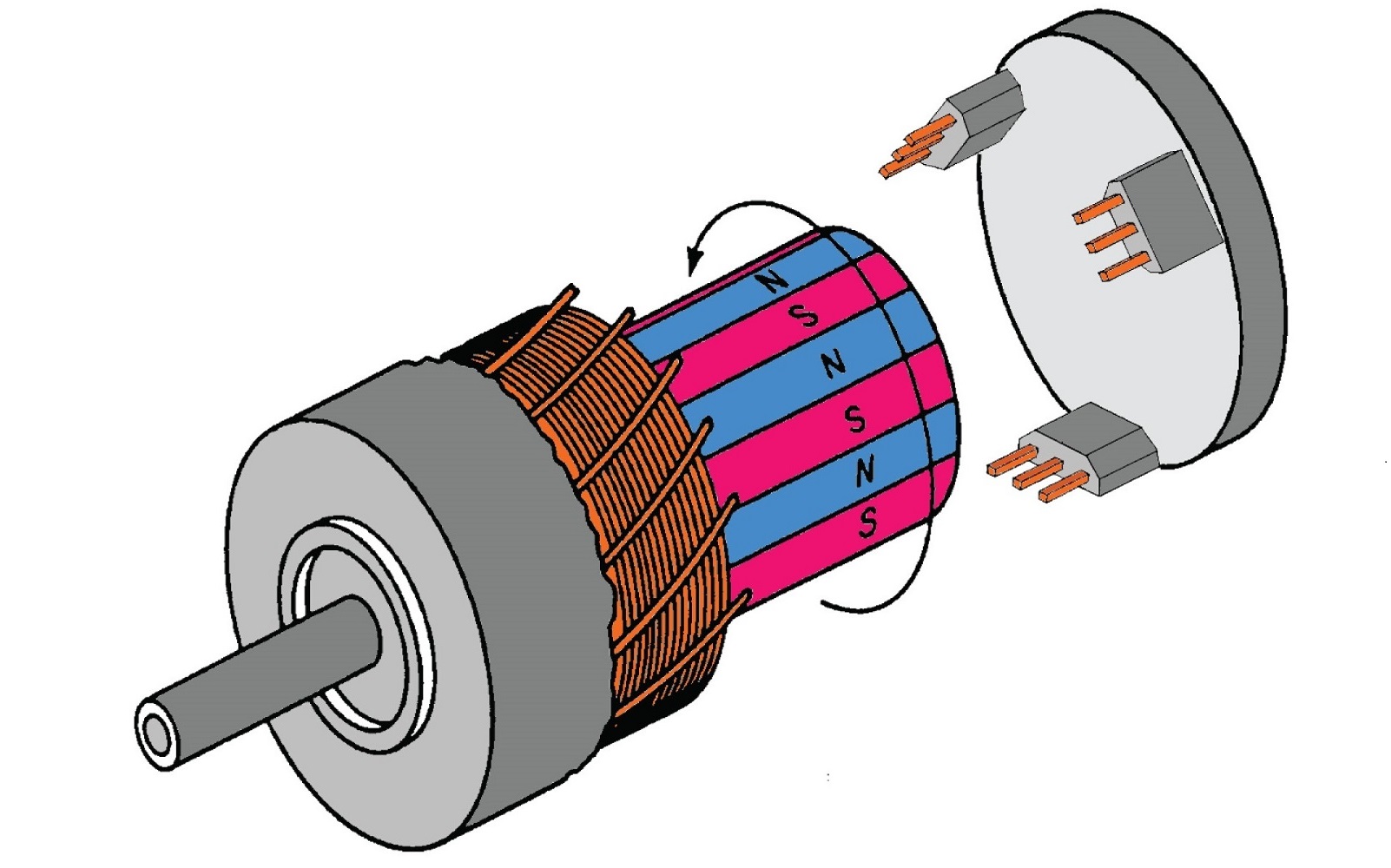
要初始化霍尔传感器,你需要提供A、B和C(有时也称为U、V和W)通道的引脚号以及电机的极对数pp。
// Hall sensor instance
// HallSensor(int hallA, int hallB , int hallC , int pp)
// - hallA, hallB, hallC - HallSensor A, B and C pins
// - pp - pole pairs
HallSensor sensor = HallSensor(2, 3, 4, 11);
步骤2. 配置
此外,霍尔传感器还有一个可选参数可以设置,即上拉位置。霍尔传感器通常需要上拉电阻,如果你需要但手头没有,可以使用Arduino的内部上拉电阻。这可以通过更改sensor.pullup变量的值来设置。默认值设置为Pullup::USE_EXTERN,但如果你想将其更改为使用MCU的内部上拉电阻,可以这样做:
// use internal pullups
sensor.pullup = Pullup::USE_INTERN;
Arduino 上拉电阻 20kΩ
使用内部上拉电阻时要小心,Arduino的上拉电阻值相对较高,约为20kΩ,这意味着在较高速度下(脉冲持续时间较短时)可能会出现一些问题。推荐的上拉电阻值在1kΩ到5kΩ之间。
步骤2.1 速度异常值去除
从v2.2.3版本开始,HallSensor类在其速度计算中实现了异常值去除功能。它基于一个简单的原理,即所有计算出的高于某个最大预期速度的速度都被视为异常值。要修改最大预期电机速度,可以修改velocity_max变量。该变量默认设置为1000rad/s,这对于大多数应用来说是一个很好的起点。除非你使用的是高性能电机,此时1000rad/s(约10,000rpm)仍可能被电机达到,在这种情况下,请将此值增加到电机无法达到的数值。
// maximal expected velocity
sensor.velocity_max = 1000; // 1000rad/s by default ~10,000 rpm
步骤3. 中断设置(可选)
从v2.3.4版本开始,HallSensor类不再需要基于中断的操作。基于中断的操作仍然可用,并且在某些应用中可能性能更好,但它不再是必需的。如果你不使用中断,可以跳过此步骤,直接进入步骤4. 实时使用霍尔传感器。
使用简易FOC库运行霍尔传感器有两种方式:
- 使用硬件外部中断
- Arduino UNO(ATmega328)引脚
2和3 - STM32开发板的任何引脚
- ESP32的任何引脚
- Teensy的任何引脚 …
- Arduino UNO(ATmega328)引脚
- 使用软件引脚变化中断,通过使用诸如PciManager库之类的库
- 仅适用于Arduino设备(ATmega328和ATmega2560)
软件中断
使用硬件外部中断通常会带来更好、更可靠的性能,但软件中断在较低速度下也能很好地工作。特别是在那些没有足够硬件中断引脚的开发板上,此功能基本上可以在这些开发板上启用FOC。
经验法则:硬件/软件还是无中断?
- 先从无中断开始,看看性能是否足以满足你的应用。
- 如果性能不够,并且你有足够的硬件中断引脚,请尝试使用硬件中断。
- 否则,如果你使用的是Arduino开发板,请尝试使用软件中断。(预期性能最差的解决方案)
硬件外部中断
Arduino UNO有两个硬件外部中断引脚,引脚2和3,Arduino Mega有6个中断引脚,引脚2、3、18、19、20和21,而ESP32和STM32开发板可以将其所有数字引脚用作中断引脚,这使得实现更加容易。
简易FOC的HallSensor类已经实现了初始化和传感器A、B和C通道回调函数。 你需要做的就是定义两个函数doA()、doB()和doC(),它们是传感器回调函数sensor.handleA()、sensor.handleB()和sensor.handleC()的缓冲函数。
// interrupt routine initialization
void doA(){sensor.handleA();}
void doB(){sensor.handleB();}
void doC(){sensor.handleC();}
然后将这些函数提供给霍尔传感器中断初始化函数sensor.enableInterrupts()
// enable hall sensor hardware interrupts
sensor.enableInterrupts(doA, doB, doC)
你可以随意命名缓冲函数。重要的是将它们提供给sensor.enableInterrupts()函数。这个过程是在可扩展性和简单性之间的权衡。这允许你将多个传感器连接到同一个MCU。你只需要实例化新的HallSensor类并创建新的缓冲函数。
// sensor 1
HallSensor sensor1 = HallSensor(...);
void doA1(){sensor1.handleA();}
void doB1(){sensor1.handleB();}
void doC1(){sensor1.handleC();}
// sensor 2
HallSensor sensor2 = HallSensor(...);
void doA2(){sensor2.handleA();}
void doB2(){sensor2.handleB();}
void doC2(){sensor2.handleC();}
void setup(){
...
sensor1.init();
sensor1.enableInterrupts(doA1,doB1,doC1);
sensor2.init();
sensor2.enableInterrupts(doA2,doB2,doC2);
...
}
软件引脚变化中断
对于Arduino UNO和其他使用ATmega328芯片的开发板,我们将不得不使用软件中断库来通过此库使用霍尔传感器,因为我们需要三个中断引脚,而ATmega328只有2个。 建议使用PciManager库。
在代码中使用该库的步骤与硬件中断非常相似。 简易FOC的HallSensor类仍然为你提供所有A、B和C通道的回调,但简易FOC库不会为你初始化中断。
为了使用PCIManager库,你需要在代码中包含它:
#include <PciManager.h>
#include <PciListenerImp.h>
下一步与之前相同,你只需初始化新的HallSensor实例。
HallSensor sensor = HallSensor(2, 3, 4, 11);
// A, B and C interrupt callback buffers
void doA(){sensor.handleA();}
void doB(){sensor.handleB();}
void doC(){sensor.handleC();}
然后声明监听器PciListenerImp:
// sensor interrupt init
PciListenerImp listenA(sensor.pinA, doA);
PciListenerImp listenB(sensor.pinB, doB);
PciListenerImp listenC(sensor.pinC, doC);
最后,运行sensor.init()后,跳过调用sensor.enableInterrupts(),并调用PCIManager库为所有传感器通道注册中断。
// initialize sensor hardware
sensor.init();
// interrupt initialization
PciManager.registerListener(&listenA);
PciManager.registerListener(&listenB);
PciManager.registerListener(&listenC);
就是这样,非常简单。如果你想要多个传感器,只需初始化新的类实例,创建新的A、B和C回调,初始化新的监听器。
// sensor 1
HallSensor sensor1 = HallSensor(2, 3, 4, 11);
void doA1(){sensor1.handleA();}
void doB1(){sensor1.handleB();}
void doC1(){sensor1.handleC();}
PciListenerImp listenC1(sensor1.pinC, doC1);
// sensor 2
HallSensor sensor2 = HallSensor(5, 6, 7, 11);
void doA2(){sensor2.handleA();}
void doB2(){sensor2.handleB();}
void doC2(){sensor2.handleC();}
PciListenerImp listenA2(sensor2.pinA, doA2);
PciListenerImp listenB2(sensor2.pinB, doB2);
PciListenerImp listenC2(sensor2.pinC, doC2);
void setup(){
...
// sensor 1
sensor1.init();
sensor1.enableInterrupts(doA1,doB1); // two hardware interrupts
PciManager.registerListener(&listenC1); // one software interrupt
// sensor 2
sensor2.init();
PciManager.registerListener(&listenA2);
PciManager.registerListener(&listenB2);
PciManager.registerListener(&listenC2);
...
}
步骤4. 实时使用霍尔传感器
该库中实现的使用霍尔传感器的方式有两种:
- 作为FOC算法的电机位置传感器
- 作为独立的位置传感器
FOC算法的位置传感器
要将霍尔传感器与该库中实现的foc算法一起使用,一旦你初始化了sensor.init()并启用了中断sensor.enableInterrupts(...),你只需通过执行以下操作将其链接到BLDC电机:
motor.linkSensor(&sensor);
然后你将能够使用电机实例访问电机的角度和速度:
motor.shaft_angle; // motor angle
motor.shaft_velocity; // motor velocity
或者通过传感器实例:
sensor.getAngle(); // motor angle
sensor.getVelocity(); // motor velocity
示例代码
这是一个无中断的霍尔传感器代码快速示例:
#include <SimpleFOC.h>
// Motor instance
BLDCMotor motor = BLDCMotor(11);
// driver instance
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 10);
// Hall sensor instance
// HallSensor(int hallA, int hallB , int hallC , int pp)
// - hallA, hallB, hallC - HallSensor A, B and C pins
// - pp - pole pairs
HallSensor sensor = HallSensor(2, 3, 4, 11);
void setup() {
// monitoring port
Serial.begin(115200);
// driver config
driver.init();
motor.linkDriver(&driver);
// initialize sensor hardware
sensor.init();
// link the motor and the sensor
motor.linkSensor(&sensor);
// enable motor
motor.init();
// align sensor and start FOC
motor.initFOC();
Serial.println("Sensor ready");
_delay(1000);
}
void loop() {
// FOC algorithm function
motor.loopFOC();
// motion control
motor.move();
}
独立传感器
要在任何给定时间获取霍尔传感器的角度和速度,你可以使用公共方法:
class HallSensor{
public:
// shaft velocity getter
float getVelocity();
// shaft angle getter
float getAngle();
}
多次调用
getVelocity调用
getVelocity时,只有当前一次调用的时间间隔长于min_elapsed_time变量中指定的时间(默认100us)时,它才会计算速度。如果自上次调用以来的时间间隔短于min_elapsed_time,则该函数将返回先前计算的值。如有必要,可以轻松更改min_elapsed_time变量:sensor.min_elapsed_time = 0.0001; // 100us by default
示例代码
这是一个无中断的霍尔传感器代码快速示例:
#include <SimpleFOC.h>
// Hall sensor instance
// HallSensor(int hallA, int hallB , int hallC , int pp)
// - hallA, hallB, hallC - HallSensor A, B and C pins
// - pp - pole pairs
HallSensor sensor = HallSensor(2, 3, 4, 11);
void setup() {
// monitoring port
Serial.begin(115200);
// initialize sensor hardware
sensor.init();
Serial.println("Sensor ready");
_delay(1000);
}
void loop() {
// IMPORTANT - call as frequently as possible
// update the sensor values
sensor.update();
// display the angle and the angular velocity to the terminal
Serial.print(sensor.getAngle());
Serial.print("\t");
Serial.println(sensor.getVelocity());
}