串联电流检测
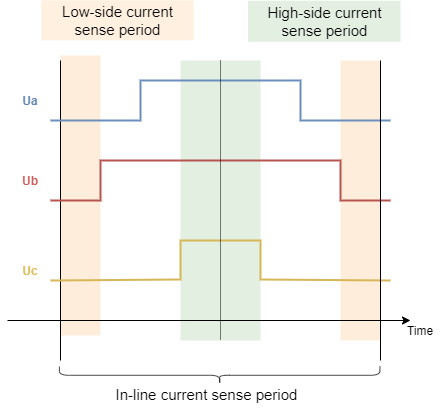
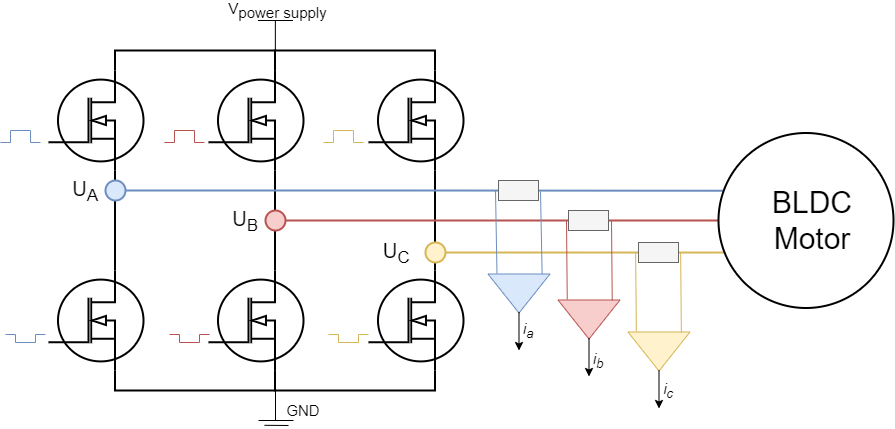
串联电流检测技术是最简单且最精确的一种。分流电阻与电机相串联,在这些分流电阻上测量到的电流即为电机相电流,与PWM占空比状态无关。因此,这种实现方式非常适合Arduino设备,因为可以在任何时候对ADC进行采样以读取电流,并且ADC采集持续时间不像其他电流检测方法那样重要。这种方法的缺点在于硬件方面,这种电流检测架构需要高精度的双向放大器,其PWM抑制能力比常规的低侧或高侧放大器要好得多。

各MCU架构的电流检测支持情况
串联电流检测目前支持几乎所有SimpleFOClibrary所支持的MCU架构。唯一不支持的架构是ESP8266,它没有2个ADC引脚,因此无法运行FOC。
| MCU | 串联电流检测 |
|---|---|
| Arduino(8位) | ✔️ |
| Arduino DUE | ✔️ |
| STM32 | ✔️ |
| STM32 B_G431B_ESC1 | ✔️ |
| ESP32 | ✔️ |
| ESP8266 | ❌ |
| SAMD21 | ✔️ |
| SAMD51 | ✔️ |
| Teensy | ✔️ |
| Raspberry Pi Pico | ✔️ |
| Portenta H7 | ✔️ |
| Renesas(UNO R4) | ❌(待定) |
硬件配置
要使用SimpleFOClibrary实例化串联电流传感器,只需创建InlineCurrentSense类的一个实例。
// InlineCurrentSensor constructor
// - shunt_resistor - shunt resistor value
// - gain - current-sense op-amp gain
// - phA - A phase adc pin
// - phB - B phase adc pin
// - phC - C phase adc pin (optional)
InlineCurrentSense current_sense = InlineCurrentSense(0.01, 20, A0, A1, A2);
该类接受分流电阻值shunt_resistor、放大增益gain以及两个或三个 ADC 通道引脚作为参数,具体取决于您可能拥有的测量硬件。为正确的驱动器 / 电机相指定正确的 adc 通道非常重要。因此,如果您的引脚A0测量 A 相电流,引脚A1测量 B 相电流,请确保按该顺序将它们提供给构造函数。
📢 这里有一个关于为不同MCU架构选择合适ADC引脚的快速指南 参见文档。
或者,可以通过指定每安培毫伏比mVpA来创建InlineCurrentSense,这在基于霍尔传感器的电流检测(如 ACS712)中更为常见。
// InlineCurrentSensor constructor
// - mVpA - mV per Amp ratio
// - phA - A phase adc pin
// - phB - B phase adc pin
// - phC - C phase adc pin (optional)
InlineCurrentSense current_sense = InlineCurrentSense(66.0, A0, A1, A2);
测量 3 相中的 2 相电流
磁场定向控制算法可以在测量 2 相或 3 相电流的情况下运行。如果测量 3 相中的 2 相电流,在定义InlineCurrentSense类时,将未使用的相值设为标志_NC(未连接)。
例如,如果测量 A 相(模拟引脚 A0)和 C 相(模拟引脚 A1)的电流,而不测量 B 相的电流,则定义电流检测类如下:
// InlineCurrentSensor constructor
InlineCurrentSense current_sense = InlineCurrentSense(shunt_resistor, gain, A0, _NC, A1);
更多示例:
// InlineCurrentSensor constructor
InlineCurrentSense current_sense = InlineCurrentSense(shunt_resistor, gain, _NC, A0, A1); // when measuring B and C phase currents and not measuring A
// InlineCurrentSensor constructor
InlineCurrentSense current_sense = InlineCurrentSense(shunt_resistor, gain, A0, A1, _NC); // when measuring A and B phase currents and not measuring C
// or
InlineCurrentSense current_sense = InlineCurrentSense(shunt_resistor, gain, A0, A1); // when measuring A and B phase currents and not measuring C
自定义增益
InlineCurrentSense类的构造函数只允许您指定一个分流电阻值和一个放大增益。如果您的硬件配置对于不同的相有不同的分流 / 放大值,您可以通过更改gain_x属性来指定它们:
// default values of per phase gains
current_sense.gain_a = 1.0 / shunt_resistor / gain;
current_sense.gain_b = 1.0 / shunt_resistor / gain;
current_sense.gain_c = 1.0 / shunt_resistor / gain;
例如,Arduino SimpleFOCShield v2 的 B 相电流检测是反相的。在这种情况下,您可以指定:
// inverse current sensing gain on phase b
current_sense.gain_b *= -1;
初始化电流检测
创建电流检测后,就可以对其进行初始化。这个init()函数配置用于读取的 ADC 硬件,并找到每个通道的 ADC 零偏移。
// init current sense
current_sense.init();
初始化函数负责:
- 配置用于电流检测的 ADC
- 校准 - 去除偏移
如果由于某种原因 ADC 配置失败,该函数将返回0;如果一切顺利,函数将返回1。
因此,我们建议您在继续之前检查初始化函数是否执行成功:
// init current sense
if (current_sense.init()) Serial.println("Current sense init success!");
else{
Serial.println("Current sense init failed!");
return;
}
一旦您的电流检测已初始化和校准,您就可以开始测量电流了!
启用调试输出
如果您希望在current_sense.init()期间看到更详细的电流检测配置调试输出,并了解有关配置和可能错误的更多详细信息,您可以使用SimpleFOCDebug类。
为了启用详细调试模式,请确保在current_sense.init()调用之前启用调试,最好在setup()函数的顶部。
Serial.begin(115200); // to output the debug information to the serial
SimpleFOCDebug::enable(&Serial);
更多信息参见SimpleFOCDebug 文档.
📢 我们强烈建议在开始使用SimpleFOClibrary时使用调试模式。它提供的信息比标准监控输出多得多,有助于排查潜在问题,甚至是特定于MCU架构的问题。
在 FOC 算法中使用电流检测
要将InlineCurrentSense与 FOC 算法一起使用,您需要做的第一件事是将您的电流检测与BLDCDriver相关联:
BLCDriverXPWM driver = BLCDriverXPWM(...);
...
InlineCurrentSense current_sense = InlineCurrentSense(...);
void setup(){
...
// init driver
driver.init();
// link current sense and driver
current_sense.linkDriver(&driver);
...
current_sense.init();
...
}
电流检测将使用驱动器参数进行不同的同步和校准程序。
API 更变 - SimpleFOClibrary v2.2.2
从库版本 v2.2.2 开始引入了与电流检测的驱动器链接,以便在 ADC 和 PWM 定时器之间传播不同的硬件特定参数,用于电流检测的高级同步。
一旦驱动器链接到电流检测,最后一步是将电流检测与您希望使用它的motor链接:
// link motor and current sense
motor.linkCurrentSense(¤t_sense);
在您的 FOC 代码中放置current_sense配置的位置?
至关重要的是,电流检测init函数要在driver.init函数调用之后调用。这将确保在进行电流检测校准时驱动器已配置,并且驱动器的有效配置可用。此外,电流检测init函数必须在通过initFOC函数启动 foc 算法之前调用。最后,我们建议将电流检测init放在motor.init()和motor.initFOC()函数之间,以确保在电流检测init期间驱动器已启用(但这不是强制性的)。以下是建议的代码结构:
void loop(){
....
// driver init
driver.init();
// link the driver to the current sense
current_sense.linkDriver(&driver);
....
// motor init
motor.init();
....
// init current sense
current_sense.init();
// link the current sense to the motor
motor.linkCurrentSense(¤t_sense);
...
// start the FOC
motor.initFOC();
}
函数initFOC()将确保driver和current_sense类都对齐,电流检测的 A 相正好是驱动器的 A 相等等,这一点非常重要。为了验证这一点,initFOC将调用电流检测的函数current_sense.driverAlign(…)。
与驱动器相的对齐driverAlign(...)
initFOC内部的电流检测和驱动器对齐是通过调用以下函数完成的:
current_sense.driverAlign(voltage_sensor_align);
该函数将使用driver实例(通过current_sense.linkDriver(&driver)链接到电流检测)向每个相施加电压(电压可以使用参数motor.voltage_sensor_align设置),并检查测量的电流是否与施加的电压方向一致。 此对齐程序能够纠正:
- adc 引脚顺序错误
- 增益符号错误
如果在initFOC期间为电机启用了监控,监控器将显示对齐状态:
0- 失败1- 成功且未做任何更改2- 成功但引脚已重新配置3- 成功但增益已反转4- 成功但引脚已重新配置且增益已反转
如果您对自己的配置有信心,并且希望跳过对齐程序,您可以在调用motor.initFOC()之前设置skip_align标志:
// skip alignment procedure
current_sense.skip_align = true;
例如,对于 Arduino SimpleFOCShield v2,您的代码可能类似于:
// one possible combination of current sensing pins for SimpleFOCShield v2
// shunt - 10milliOhm
// gain - 50 V/V
InlineCurrentSense current_sense = InlineCurrentSense(0.01, 50.0, A0, A2);
void loop(){
....
// driver init
driver.init();
// link the driver to the current sense
current_sense.linkDriver(&driver);
....
// motor init
motor.init();
....
// init current sense
current_sense.init();
// link the current sense to the motor
motor.linkCurrentSense(¤t_sense);
...
// invert phase b gain
current_sense.gain_b *=-1;
// skip alignment
current_sense.skip_align = true;
...
// start the FOC
motor.initFOC();
}
独立电流检测
要将串联电流传感器用作独立传感器,在配置硬件并校准后,您可以通过调用以下函数读取相电流:
PhaseCurrent_s current = current_sense.getPhaseCurrents();
该函数返回PhaseCurrent_s结构,该结构有三个变量a、b和c。例如,您可以将它们打印出来;
Serial.println(current.a);
Serial.println(current.b);
Serial.println(current.c); // 0 if only two currents mode
如果您在InlineCurrentSense中仅使用两相电流测量,它将返回第三相电流current.c等于 0。
有时相电流难以解释,因此该电流检测类使您能够读取变换后的电流矢量幅度。电机所汲取的绝对直流电流。
float current_mag = current_sense.getDCCurrent();
此外,如果您可以访问连接到驱动器的电机位置传感器,您可以通过将其提供给getDCCurrent方法来获取电机所汲取的直流电流的有符号值。
float current = current_sense.getDCCurrent(motor_electrical_angle);
最后,如果您可以访问电机位置传感器,电流检测类将能够告诉您电机所汲取的 FOC 电流 D 和 Q。
DQCurrent_s current = current_sense.getFOCCurrents(motor_electrical_angle);
该函数返回DQCurrent_s结构,该结构有两个变量d和q。例如,您可以将它们打印出来:
Serial.println(current.d);
Serial.println(current.q);
示例代码
以下是使用SimpleFOClibrary和SimpleFOCShield v2 的串联电流检测作为独立传感器的简单示例。
#include <SimpleFOC.h>
// current sensor
// shunt resistor value
// gain value
// pins phase A,B
InlineCurrentSense current_sense = InlineCurrentSense(0.01f, 50.0f, A0, A2);
void setup() {
// initialise the current sensing
current_sense.init();
// for SimpleFOCShield v2.01/v2.0.2
current_sense.gain_b *= -1;
Serial.begin(115200);
Serial.println("Current sense ready.");
}
void loop() {
PhaseCurrent_s currents = current_sense.getPhaseCurrents();
float current_magnitude = current_sense.getDCCurrent();
Serial.print(currents.a*1000); // milli Amps
Serial.print("\t");
Serial.print(currents.b*1000); // milli Amps
Serial.print("\t");
Serial.print(currents.c*1000); // milli Amps
Serial.print("\t");
Serial.println(current_magnitude*1000); // milli Amps
}