运动控制实现 v1.6
SimpleFOC库 实现了 3 种运动控制环路:
- 使用电压的扭矩控制
- 速度运动控制
- 位置/角度控制
通过将 motor.controller 变量设置为 ControlType 结构中的一种来选择运动控制算法:
// Motion control type
enum ControlType{
voltage,// Torque control using voltage
velocity,// Velocity motion control
angle// Position/angle motion control
};
设置方式如下:
motor.controller = ControlType::voltage;
// or
motor.controller = ControlType::velocity;
// or
motor.controller = ControlType::angle;
该变量也可以实时更改!
实时执行 move()
实时运动控制在 move() 函数内部执行。移动函数根据 controller 变量执行其中一个控制环路。move() 函数的参数 new_target 是要设置到控制环路的目标值。new_target 值是可选的,不需要设置。如果未设置,运动控制将使用 motor.target 变量。
以下是实现代码:
// Iterative function running outer loop of the FOC algorithm
// Behavior of this function is determined by the motor.controller variable
// It runs either angle, velocity or voltage loop
// - needs to be called iteratively it is asynchronous function
// - if target is not set it uses motor.target value
void BLDCMotor::move(float new_target = NOT_SET) {
// check if target received through the parameter new_target
// if not use the internal target variable (motor.target)
if( new_target != NOT_SET ) target = new_target;
// get angular velocity
shaft_velocity = shaftVelocity();
// choose control loop
switch (controller) {
case ControlType::voltage:
// set the target voltage for FCO loop
voltage_q = target;
break;
case ControlType::angle:
// angle set point
shaft_angle_sp = target;
// calculate the necessary velocity to achieve target position
shaft_velocity_sp = positionP( shaft_angle_sp - shaft_angle );
// calculate necessary voltage to be set by FOC loop
voltage_q = velocityPI(shaft_velocity_sp - shaft_velocity);
break;
case ControlType::velocity:
// velocity set point
shaft_velocity_sp = target;
// calculate necessary voltage to be set by FOC loop
voltage_q = velocityPI(shaft_velocity_sp - shaft_velocity);
break;
}
}
轴速度滤波 shaftVelocity
速度运动控制的第一步是从传感器获取速度值。由于某些传感器噪声很大,特别是在大多数情况下速度值是通过对位置值求导来计算的,因此我们实现了一个低通滤波器来平滑测量值。 速度计算函数是 shaftVelocity()。
// shaft velocity calculation
float BLDCMotor::shaftVelocity() {
float Ts = (_micros() - LPF_velocity.timestamp) * 1e-6;
// quick fix for strange cases (micros overflow)
if(Ts <= 0 || Ts > 0.5) Ts = 1e-3;
// calculate the filtering
float alpha = LPF_velocity.Tf/(LPF_velocity.Tf + Ts);
float vel = alpha*LPF_velocity.prev + (1-alpha)*sensor->getVelocity();
// save the variables
LPF_velocity.prev = vel;
LPF_velocity.timestamp = _micros();
return vel;
}
低通滤波器是标准的一阶低通滤波器,具有一个时间常数 Tf,可通过 motor.LPF_velocity 结构进行配置:
// Low pass filter structure
struct LPF_s{
float Tf; // Low pass filter time constant
long timestamp; // Last execution timestamp
float prev; // filtered value in previous execution step
};
低通速度滤波器原理
有关低通滤波器的更多理论信息,请访问 理论爱好者角落
使用电压的扭矩控制
由于对于大多数低成本云台电机和驱动器,通常无法进行电流测量,因此必须直接使用电压进行扭矩控制。
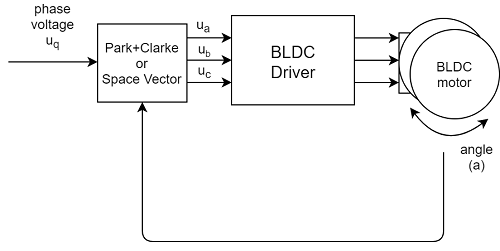
该控制环路假设电压与电流成正比,而电流又与扭矩成正比。一般来说这是正确的,但并非总是如此。但在广义上,它在低电流应用(云台电机)中工作得很好。
这与我们通常对直流电机所做的假设相同。
控制环路的实现很简单,基本上是将目标电压设置到 voltage_q 变量,以便使用 FOC 算法 loopFOC() 设置到电机。
API 用法
有关如何使用此环路的更多信息,请参阅:电压环 API 文档
使用电压的扭矩控制理论
有关这种控制类型的更多理论信息,请访问 理论爱好者角落
速度运动控制
一旦我们获得了当前速度值和我们想要达到的目标值,我们需要计算要设置到电机的适当电压值,以跟随目标值。
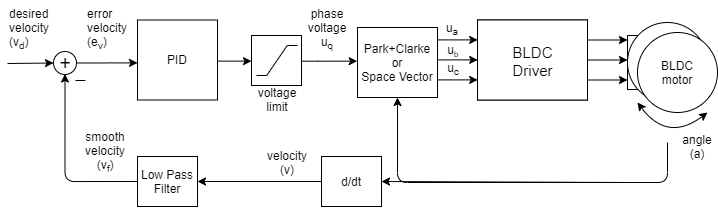
这是通过在 velocityPI() 函数中使用 PI 控制器来完成的。
// velocity control loop PI controller
float BLDCMotor::velocityPI(float tracking_error) {
return controllerPI(tracking_error, PID_velocity);
}
BLDCMotor 类实现了名为 controllerPI() 的通用 PI 控制器函数。
// PI controller function
float BLDCMotor::controllerPI(float tracking_error, PI_s& cont){
float Ts = (_micros() - cont.timestamp) * 1e-6;
// quick fix for strange cases (micros overflow)
if(Ts <= 0 || Ts > 0.5) Ts = 1e-3;
// u(s) = (P + I/s)e(s)
// Tustin transform of the PI controller ( a bit optimized )
// uk = uk_1 + (I*Ts/2 + P)*ek + (I*Ts/2 - P)*ek_1
float tmp = cont.I*Ts*0.5;
float voltage = cont.voltage_prev + (tmp + cont.P) * tracking_error + (tmp - cont.P) * cont.tracking_error_prev;
// antiwindup - limit the output voltage_q
if (abs(voltage) > cont.voltage_limit) voltage = voltage > 0 ? cont.voltage_limit : -cont.voltage_limit;
// limit the acceleration by ramping the the voltage
float d_voltage = voltage - cont.voltage_prev;
if (abs(d_voltage)/Ts > cont.voltage_ramp) voltage = d_voltage > 0 ? cont.voltage_prev + cont.voltage_ramp*Ts : cont.voltage_prev - cont.voltage_ramp*Ts;
cont.voltage_prev = voltage;
cont.tracking_error_prev = tracking_error;
cont.timestamp = _micros();
return voltage;
}
PI 控制器通过 motor.PID_velocity 结构进行配置:
// PI controller configuration structure
struct PI_s{
float P; // Proportional gain
float I; // Integral gain
float voltage_limit; // Voltage limit of the controller output
float voltage_ramp; // Maximum speed of change of the output value
long timestamp; // Last execution timestamp
float voltage_prev; // last controller output value
float tracking_error_prev; // last tracking error value
};
API 用法
有关如何使用此环路的更多信息,请参阅:速度环 API 文档
PI 控制器理论
有关此库中实现的 PI 控制器的更多理论信息,请访问 理论爱好者角落
位置运动控制
现在,当我们解释了速度控制环路后,我们可以如图片所示级联构建我们的位置控制环路。
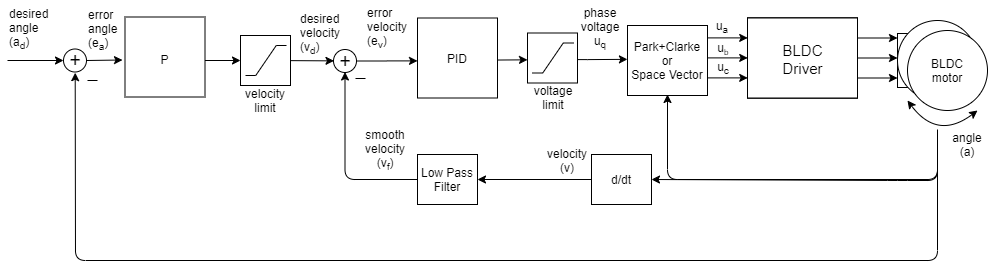
当我们有想要达到的目标角度时,我们将使用 P 控制器来计算我们需要的必要速度,然后速度环路将计算必要的电压 voltage_q 以达到我们想要的速度和角度。
位置 P 控制器在 positionP() 函数中实现:
// P controller for position control loop
float BLDCMotor::positionP(float ek) {
// calculate the target velocity from the position error
float velocity_target = P_angle.P * ek;
// constrain velocity target value
if (abs(velocity_target) > velocity_limit) velocity_target = velocity_target > 0 ? velocity_limit : -velocity_limit;
return velocity_target;
}
它通过 motor.P_angle 结构进行配置:
// P controller configuration structure
struct P_s{
float P; // Proportional gain
long timestamp; // Last execution timestamp
float velocity_limit; // Velocity limit of the controller output
};
API 用法
有关如何使用此环路的更多信息,请参阅:角度环 API 文档