BLDC驱动 3PWM - BLDCDriver3PWM
这个类提供了大多数常见的3PWM无刷直流电机驱动器的抽象层。基本上,任何可以使用3PWM信号运行的BLDC驱动板都可以用这个类来表示。 例如:
- Arduino SimpleFOCShield
- Arduino SimpleFOC PowerShield
- L6234 breakout板
- HMBGC v2.2
- DRV830x(可在3PWM或6PWM模式下运行)
- X-NUCLEO-IHM07M1
- 等等

步骤1. 硬件设置
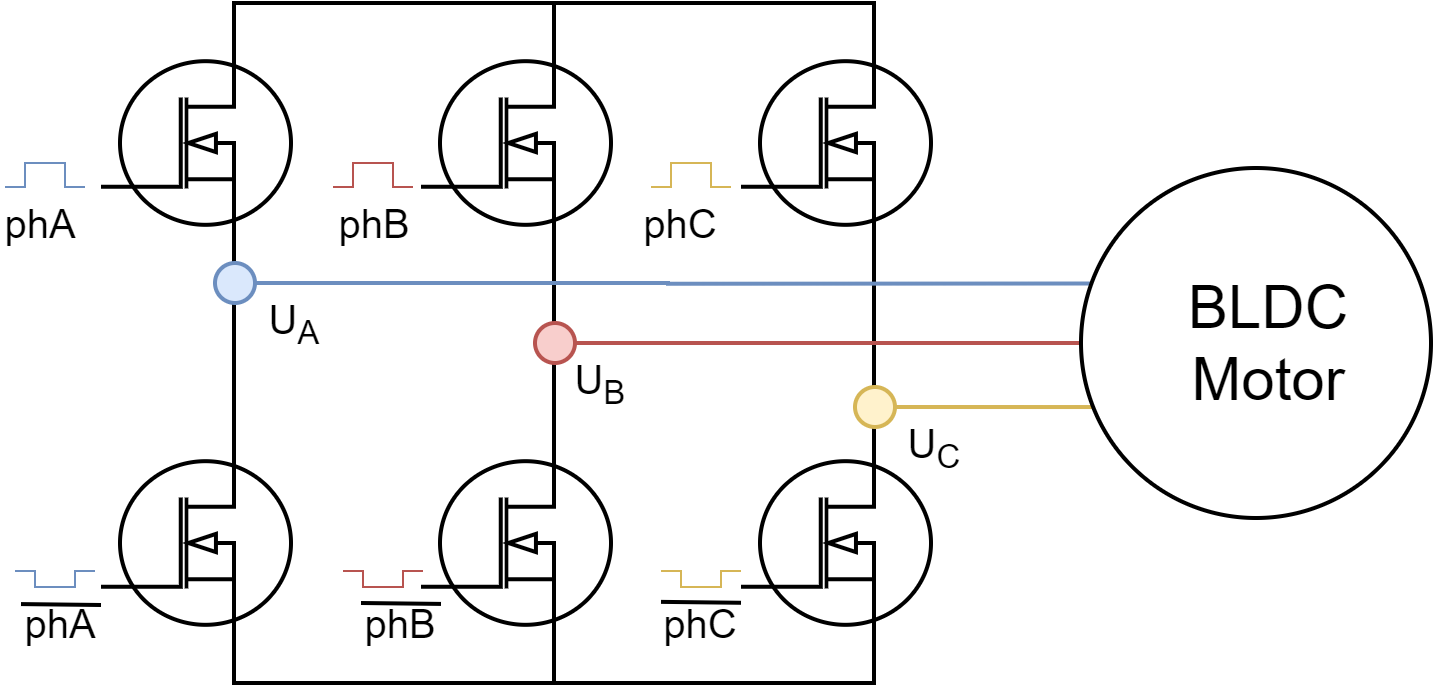
要创建与BLDC驱动器的接口,你需要指定每个电机相的3个pwm引脚编号,以及可选的enable引脚。
// BLDCDriver3PWM( int phA, int phB, int phC, int en)
// - phA, phB, phC - A,B,C phase pwm pins
// - enable pin - (optional input)
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 10, 11, 8);
此外,这个 bldc 驱动类允许用户为每个相提供使能信号(如果有的话)。SimpleFOC库将处理每个使能引脚的启用 / 禁用调用,并且如果使用Trapezoidal_120或Trapezoidal_150调制类型,使用这些引脚,库将能够为电机相设置高阻抗,这非常适合反电动势控制,例如:
// BLDCDriver3PWM( int phA, int phB, int phC, int enA, int enB, int enC )
// - phA, phB, phC - A,B,C phase pwm pins
// - enA, enB, enC - enable pin for each phase (optional)
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 10, 11, 8, 7, 6);
📢 这里有一个关于为不同MCU架构选择合适PWM引脚的快速指南 参见文档。
⚠️ 注意: 当将3PWM BLDC驱动器与步进电机一起使用时,确保公共相`Uo`连接到驱动器的C相引脚。
即使公共相Uo物理上连接到其他驱动器输出(A或B),请在驱动构造函数中将其作为C相引脚提供。这对于步进电机的正确运行很重要。
考虑驱动器连接到 MCU 引脚的示例如下:
#define PIN_A 9 #define PIN_B 10 #define PIN_C 11 #define ENABLE 8如果公共相Uo连接到驱动器引脚A,你仍然应该在驱动构造函数中将其作为C相引脚提供:
// common phase `Uo` connected to driver pin `A` so it is provided as the `C` phase pin BLDCDriver3PWM driver = BLDCDriver3PWM(PIN_C, PIN_B, PIN_A, ENABLE);如果公共相Uo连接到驱动器引脚B,你应该在驱动构造函数中将其作为C相引脚提供:
// common phase `Uo` connected to driver pin `B` so it is provided as the `C` phase pin BLDCDriver3PWM driver = BLDCDriver3PWM(PIN_A, PIN_C, PIN_B, ENABLE);或者如果公共相Uo连接到驱动器引脚C,你应该在驱动构造函数中将其作为C相引脚提供:
// common phase `Uo` connected to driver pin `C` so it is provided as the `C` phase pin BLDCDriver3PWM driver = BLDCDriver3PWM(PIN_A, PIN_B, PIN_C, ENABLE);
低侧电流检测注意事项
由于 ADC 转换必须与所有相上生成的 PWM 同步,重要的是为所有相生成的 PWM 都具有对齐的 PWM。由于微控制器通常有多个定时器用于在其引脚上生成 PWM,不同架构的微控制器在不同定时器生成的 PWM 之间具有不同程度的对齐。
经验法则:PWM定时器引脚
为了最大限度地提高低侧电流检测的工作效果,我们建议确保为驱动器选择的所有PWM引脚都属于同一个定时器。 找出哪些引脚属于不同的定时器可能需要花一些时间查看 MCU 数据手册 😄 你也可以随时向社区寻求帮助 - 社区连接!
步骤 2.1 PWM 配置
// pwm frequency to be used [Hz]
// for atmega328 either 4k or 32kHz
// esp32/stm32/teensy configurable
driver.pwm_frequency = 20000;
以下是不同微控制器及其在 Arduino SimpleFOC库中使用的 PWM 频率和分辨率的列表。
| MCU | 默认频率 | 最大频率 | PWM 分辨率 | 中心对齐 | 可配置频率 |
|---|---|---|---|---|---|
| Arduino UNO (Atmega328) | 32 kHz | 32 kHz | 8 位 | 是 | 是(4kHz 或 32kHz) |
| STM32 | 25kHz | 50kHz | 14 位 | 是 | 是 |
| ESP32 | 30kHz | 50kHz | 10 位 | 是 | 是 |
| Teensy | 25kHz | 50kHz | 8 位 | 是 | 是 |
所有这些设置都在库源代码的drivers/hardware_specific/x_mcu.cpp/h中定义。
低侧电流检测注意事项
由于 ADC 转换需要一些时间完成,并且这种转换只能在特定的时间窗口内进行(当所有相都接地 - 低侧 mosfet 导通时),使用适当的 PWM 频率很重要。PWM 频率将决定 PWM 的每个周期有多长,进而决定低侧开关导通的时间。较高的 PWM 频率将为 ADC 读取电流值留下更少的时间。
另一方面,较高的 PWM 频率将产生更平滑的操作,因此这里肯定存在权衡。
经验法则:PWM频率
经验法则是保持在20kHz左右。driver.pwm_frequency = 20000;
步骤 2.2 电压
驱动类负责将 pwm 占空比设置到驱动输出引脚,它需要知道所连接的直流电源电压。
此外,驱动类允许用户设置驱动将设置到输出引脚的绝对直流电压限制。
// power supply voltage [V]
driver.voltage_power_supply = 12;
// Max DC voltage allowed - default voltage_power_supply
driver.voltage_limit = 12;
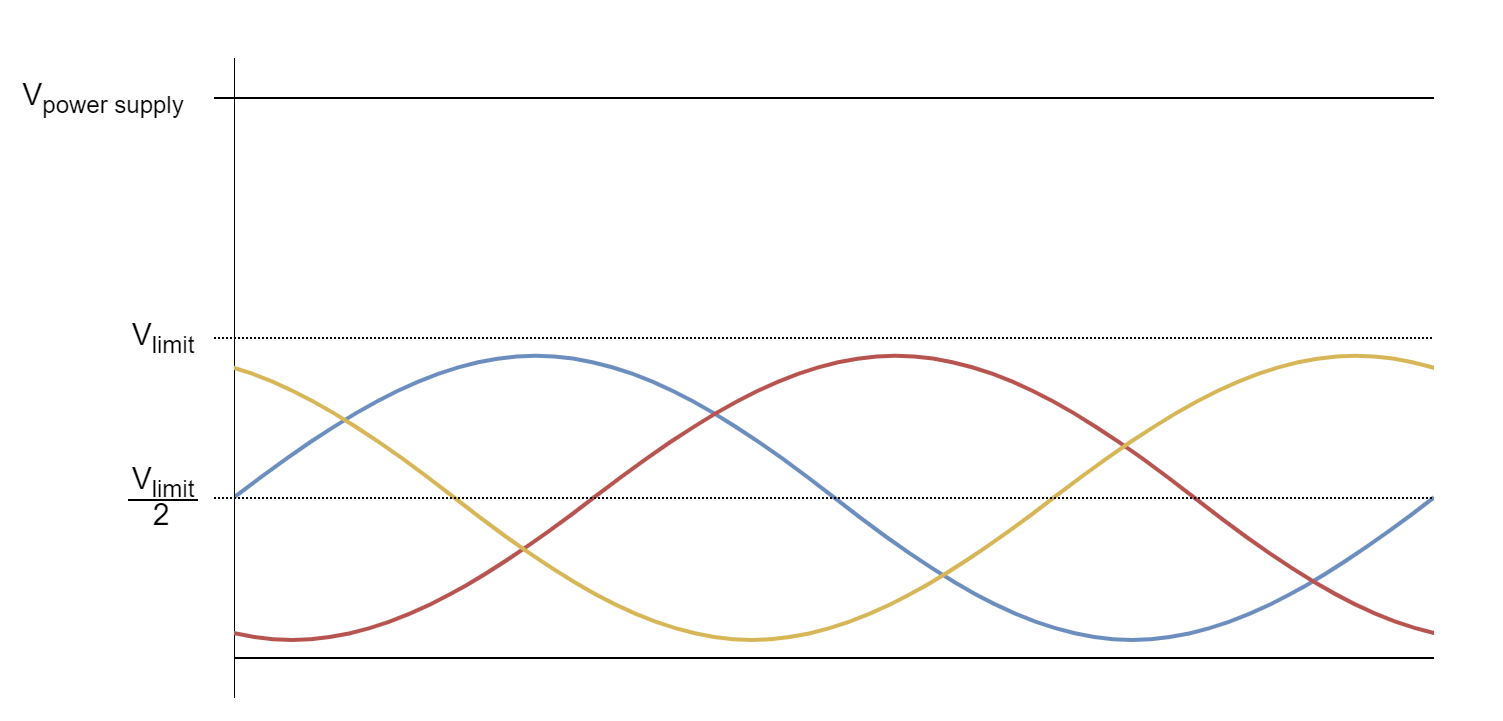

这个参数也被BLDCMotor类使用。如上图所示,一旦设置了电压限制driver.voltage_limit,它将被传送到BLDCMotor类中的 FOC 算法,相电压将以driver.voltage_limit/2为中心。
因此,如果担心电机产生过高的电流,这个参数非常重要。在这些情况下,这个参数可以用作安全特性。
步骤 2.3 初始化
一旦设置了所有必要的配置参数,就会调用驱动函数init()。这个函数使用配置参数,为驱动代码执行配置所有必要的硬件和软件。
// driver init
driver.init();
这个函数负责:
- 确定并配置用于 PWM 生成的硬件定时器
- 验证所有提供的引脚是否可用于生成 PWM
- 配置 PWM 通道
如果由于某种原因驱动配置失败,这个函数将返回0;如果一切顺利,函数将返回1。所以我们建议你在继续之前检查初始化函数是否成功执行
Serial.print("Driver init ");
// init driver
if (driver.init()) Serial.println("success!");
else{
Serial.println("failed!");
return;
}
启用调试输出
如果你希望在driver.init()期间看到更详细的驱动配置调试输出,并查看有关驱动配置和可能错误的更多细节,你可以使用SimpleFOCDebug类。
为了启用详细调试模式,确保在driver.init()调用之前启用调试,最好在setup()函数的顶部。
Serial.begin(115200); // to output the debug information to the serial
SimpleFOCDebug::enable(&Serial);
更多信息参见SimpleFOCDebug 文档.
📢 我们强烈建议在开始使用SimpleFOC库时使用调试模式。 它提供了比标准监控输出多得多的信息,并且可以帮助解决潜在的问题,甚至是特定于MCU架构的问题。
步骤 3. 在实时中使用BLDCDriver3PWM
BLDC 驱动类是为了与SimpleFOC库一起使用而开发的,并为BLDCMotor类中实现的 FOC 算法提供抽象层。但是BLDCDriver3PWM类也可以作为独立类使用,并且可以选择使用 bldc 驱动实现任何其他类型的控制算法。
FOC 算法支持
在 FOC 控制的上下文中,所有驱动的使用都由运动控制算法在内部完成,只需将驱动链接到BLDCMotor类即可启用。
// linking the driver to the motor
motor.linkDriver(&driver)
独立驱动
如果你希望将 bldc 驱动用作独立设备并在其周围实现自己的逻辑,这很容易做到。以下是一个非常简单的独立应用程序的示例代码。
// BLDC driver standalone example
#include <SimpleFOC.h>
// BLDC driver instance
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 8);
void setup() {
// pwm frequency to be used [Hz]
driver.pwm_frequency = 20000;
// power supply voltage [V]
driver.voltage_power_supply = 12;
// Max DC voltage allowed - default voltage_power_supply
driver.voltage_limit = 12;
// driver init
driver.init();
// enable driver
driver.enable();
_delay(1000);
}
void loop() {
// setting pwm
// phase A: 3V, phase B: 6V, phase C: 5V
driver.setPwm(3,6,5);
}
具有三个使能引脚(每个相一个)的 BLDC 驱动的示例代码。这段代码将一次将一个相置于高阻抗模式,并在其余两个相上施加 3 伏和 6 伏电压。
// BLDC driver standalone example
#include <SimpleFOC.h>
// BLDC driver instance
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 10, 11, 8, 7, 6);
void setup() {
// pwm frequency to be used [Hz]
driver.pwm_frequency = 20000;
// power supply voltage [V]
driver.voltage_power_supply = 12;
// Max DC voltage allowed - default voltage_power_supply
driver.voltage_limit = 12;
// driver init
driver.init();
// enable driver
driver.enable();
_delay(1000);
}
void loop() {
// phase (A: 3V, B: 6V, C: high impedance )
// set the phase C in high impedance mode - disabled or open
driver.setPhaseState(_ACTIVE , _ACTIVE , _HIGH_Z); // _HIGH_Z or _HIGH_IMPEDANCE
driver.setPwm(3, 6, 0);
_delay(1000);
// phase (A: 3V, B: high impedance, C: 6V )
// set the phase B in high impedance mode - disabled or open
driver.setPhaseState(_ACTIVE , _HIGH_IMPEDANCE, _ACTIVE);
driver.setPwm(3, 0, 6);
_delay(1000);
// phase (A: high impedance, B: 3V, C: 6V )
// set the phase A in high impedance mode - disabled or open
driver.setPhaseState(_HIGH_IMPEDANCE, _ACTIVE, _ACTIVE);
driver.setPwm(0, 3, 6);
_delay(1000);
}