线控转向
使用简易FOC扩展板和 Arduino UNO


可在此处下载用于 IPower GM4108H-120T 电机的 3D 打印支架的 STL 文件以及 STEP 和 solidworks 项目,该支架带有 CUI amt103 编码器的安装座,在图片和 Youtube 视频中均有使用。
连接所有组件
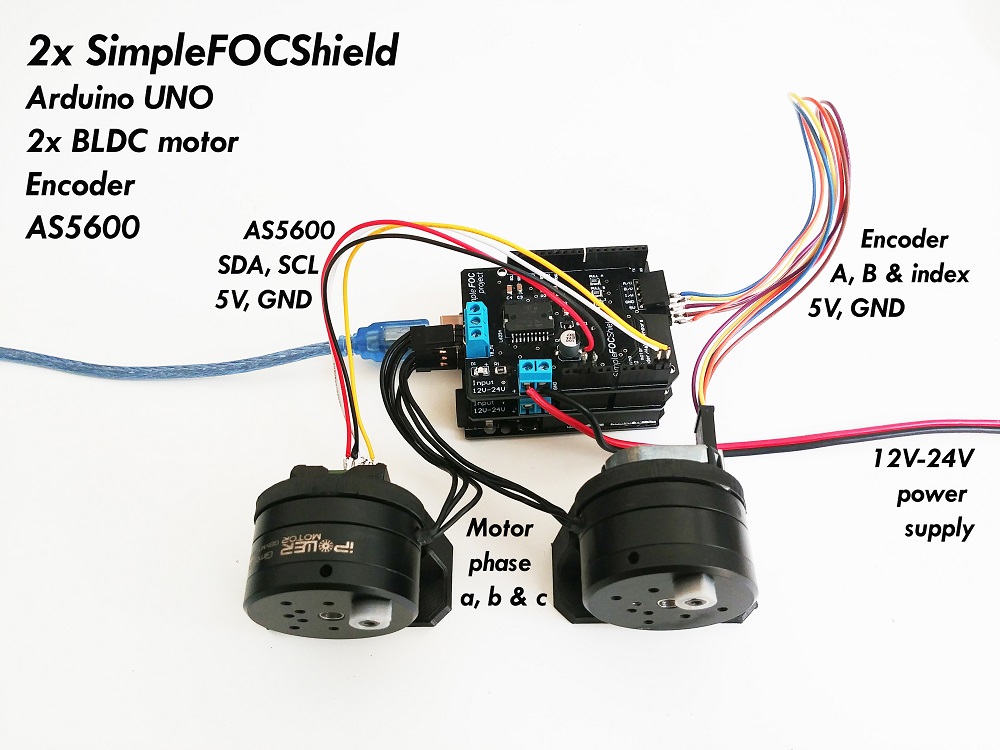
以下是本项目中使用的设置图片。查看 Arduino 代码以了解所使用的引脚编号。
Arduino 代码
本示例的代码非常简单。由于我们使用两个无刷直流电机,因此需要使用所有 6 个 PWM Arduino UNO 引脚,这意味着我们没有足够的硬件中断引脚。因此,我们需要使用软件中断。在本示例中,我们将使用 PciManager 库。它使用起来非常简单,我强烈推荐,但也可以使用其他类似的库。
两个电机都将在扭矩/电压控制模式下进行控制,一个电机将使用编码器作为传感器,另一个将使用具有 I2C 通信的磁传感器(AS5600)。 初始化两个电机和传感器后,无需进行其他配置,我们可以为两个电机初始化 FOC 算法 initFOC(),然后就可以进入实时执行阶段了。
“智能部分”位于 loop() 函数中。😄
为了维持两个电机位置之间的“虚拟链接”,我们编写了如下代码:
motor1.move( 5*(motor2.shaft_angle - motor1.shaft_angle));
motor2.move( 5*(motor1.shaft_angle - motor2.shaft_angle));
此控制算法根据电机与另一个电机位置的距离为电机设置电压。 常数 5 是一个比例增益,它是通过经验得出的,并且对于每个设置都会有所不同。但一般来说,这个数字越高,链接就越“坚硬”,就越难在电机位置之间引入偏移。
就是这样,以下是本示例的完整代码。
#include <SimpleFOC.h>
// software interrupt library
#include <PciManager.h>
#include <PciListenerImp.h>
BLDCMotor motor1 = BLDCMotor(11);
BLDCDriver3PWM driver1 = BLDCDriver3PWM(3, 10, 6, 7);
Encoder encoder1 = Encoder(A2, 2, 500, A0);
void doA1(){encoder1.handleA();}
void doB1(){encoder1.handleB();}
void doI1(){encoder1.handleIndex();}
// encoder interrupt init
PciListenerImp listenerA(encoder1.pinA, doA1);
PciListenerImp listenerB(encoder1.pinB, doB1);
PciListenerImp listenerI(encoder1.index_pin, doI1);
BLDCMotor motor2 = BLDCMotor( 11);
BLDCDriver3PWM driver2 = BLDCDriver3PWM(9, 11, 5, 8);
MagneticSensorI2C sensor2 = MagneticSensorI2C(0x36, 12, 0x0E, 4);
void setup() {
// initialise encoder hardware
encoder1.init();
// interrupt initialization
PciManager.registerListener(&listenerA);
PciManager.registerListener(&listenerB);
PciManager.registerListener(&listenerI);
// link the motor to the sensor
motor1.linkSensor(&encoder1);
// init driver
driver1.init();
// link driver
motor1.linkDriver(&driver1);
// set control loop type to be used
motor1.controller = MotionControlType::torque;
// initialise motor
motor1.init();
// align encoder and start FOC
motor1.initFOC();
// initialise magnetic sensor hardware
sensor2.init();
// link the motor to the sensor
motor2.linkSensor(&sensor2);
// init driver
driver2.init();
// link driver
motor2.linkDriver(&driver2);
// set control loop type to be used
motor2.controller = MotionControlType::torque;
// initialise motor
motor2.init();
// align encoder and start FOC
motor2.initFOC();
Serial.println("Steer by wire ready!");
_delay(1000);
}
void loop() {
// iterative setting FOC phase voltage
motor1.loopFOC();
motor2.loopFOC();
// virtual link code
motor1.move( 5*(motor2.shaft_angle - motor1.shaft_angle));
motor2.move( 5*(motor1.shaft_angle - motor2.shaft_angle));
}
触觉速度控制
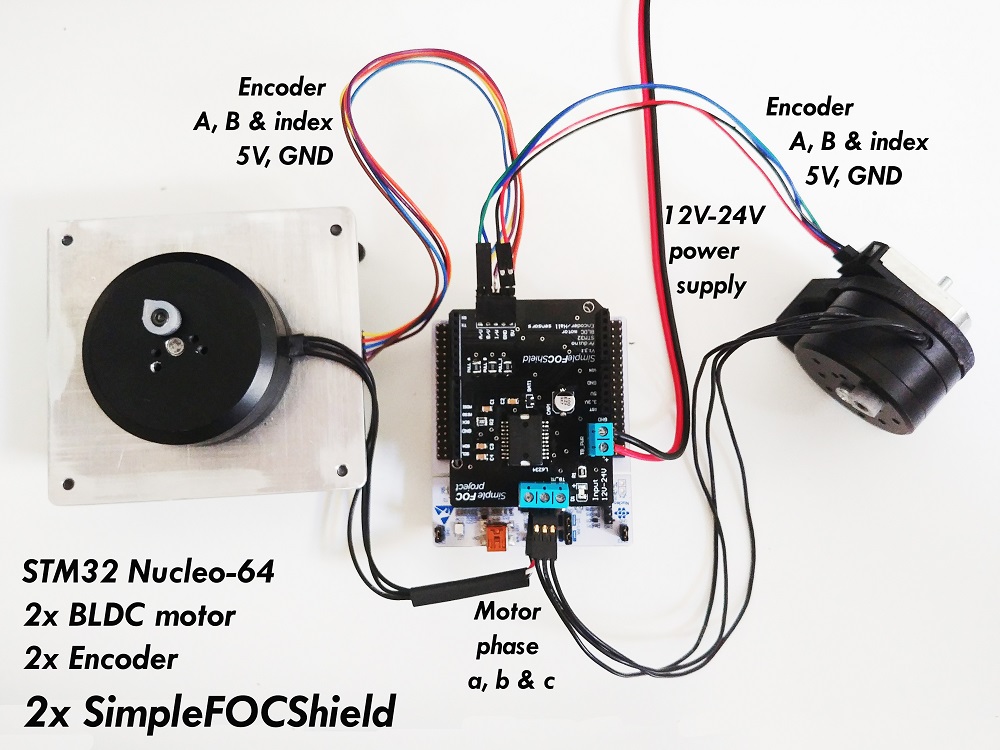
使用简易FOC扩展板和 Stm32 Nucleo-64

连接所有组件
以下是本项目中使用的设置图片。查看 Arduino 代码以了解所使用的引脚编号。
Arduino 代码
在本示例中,我们将使用 Nucleo-64 板和两个带编码器的无刷直流电机。由于 Nucleo 在硬件中断方面没有问题(每个引脚都可以是外部中断引脚),因此使用 6 个 PWM 引脚不会导致代码复杂化。Nucleo 和 Arduino UNO 之间的唯一区别是 Nucleo 引脚不能使用其引脚 11 进行 PWM,因此我们需要改用引脚 13。其余代码非常简单明了。
我们定义两个电机和两个编码器并将它们链接在一起。
#include <SimpleFOC.h>
BLDCMotor motor1 = BLDCMotor(11);
BLDCDriver3PWM driver1 = BLDCDriver3PWM(9, 6, 5, 7);
Encoder encoder1 = Encoder(A1, A2, 8192);
void doA1(){encoder1.handleA();}
void doB1(){encoder1.handleB();}
BLDCMotor motor2 = BLDCMotor(11);
BLDCDriver3PWM driver2 = BLDCDriver3PWM(3, 13, 10, 8);
Encoder encoder2 = Encoder(A3, 2, 500);
void doA2(){encoder2.handleA();}
void doB2(){encoder2.handleB();}
void setup() {
// initialise encoder hardware
encoder1.init();
encoder1.enableInterrupts(doA1,doB1);
encoder2.init();
encoder2.enableInterrupts(doA2,doB2);
// link the motor to the sensor
motor1.linkSensor(&encoder1);
motor2.linkSensor(&encoder2);
// config drivers
driver1.init();
driver2.init();
// link the motor to the driver
motor1.linkDriver(&driver1);
motor2.linkDriver(&driver2);
}
void loop(){}
然后我们将一个电机的运动控制定义为电压控制,另一个定义为速度控制:
// set control loop type to be used
motor1.controller = MotionControlType::torque;
motor2.controller = MotionControlType::velocity;
此外,我们通过增加 Tf 值引入了更高程度的滤波,并稍微提高了积分增益 I 以获得更好的跟随效果。
// augment filtering
motor2.LPF_velocity.Tf = 0.02;
// rise I gain
motor2.PID_velocity.I = 40;
为了完成 setup() 函数,我们只需初始化电机和 FOC 算法。
“智能部分”同样在 loop() 函数中。“虚拟链接”代码如下:
// virtual link code
motor1.move(5*(motor2.shaft_velocity/10 - motor1.shaft_angle));
motor2.move(10*motor1.shaft_angle);
这种控制策略基本上是说 motor2 的目标速度将与 motor1 的位置成比例。另一方面,它根据 motor2 的速度和 motor1 的位置之间的差异为 motor1 设置电压。这在这两个变量之间创建了一个“虚拟链接”。
常数 5 是比例增益,其作用与前一个示例相同。它只会使 motor1 在跟随 motor2 速度时或多或少地响应,并且希望将差异保持在 0。
常数 10 则有所不同。它是一个比例因子,有助于更好地将速度映射到位置。例如,在我们使用的示例中,motor2 的最大速度为 60rad/s,但我们不希望我们的仪表旋转 10 圈来显示这个速度。我们希望它最大旋转 1 圈 ~6rad,因此常数为 10。但在你的情况下,也许你将运行一个无人机电机,它以数千转/分的速度旋转,你可能希望有更大的比例,比如 100 甚至 1000。 另一方面,也许你会想要一个非常精确的慢速电机,它的速度会低于 1 弧度/秒。那么你可能希望使用 ~0.1 甚至更小的值。因此,这将取决于你的应用程序和你需要的精度。
另一个值得注意的有趣之处是,这个比例因子可以是可变的,所以你也可以实时改变它。
这里是完整的示例程序:
#include <SimpleFOC.h>
BLDCMotor motor1 = BLDCMotor(11);
BLDCDriver3PWM driver1 = BLDCDriver3PWM(9, 6, 5, 7);
Encoder encoder1 = Encoder(A1, A2, 8192);
void doA1(){encoder1.handleA();}
void doB1(){encoder1.handleB();}
BLDCMotor motor2 = BLDCMotor(11);
BLDCDriver3PWM driver2 = BLDCDriver3PWM(3, 13, 10, 8);
Encoder encoder2 = Encoder(A3, 2, 500);
void doA2(){encoder2.handleA();}
void doB2(){encoder2.handleB();}
void setup() {
// initialise encoder hardware
encoder1.init();
encoder1.enableInterrupts(doA1,doB1);
encoder2.init();
encoder2.enableInterrupts(doA2,doB2);
// link the motor to the sensor
motor1.linkSensor(&encoder1);
motor2.linkSensor(&encoder2);
// config drivers
driver1.init();
driver2.init();
// link the motor to the driver
motor1.linkDriver(&driver1);
motor2.linkDriver(&driver2);
// set control loop type to be used
motor1.controller = MotionControlType::torque;
motor2.controller = MotionControlType::velocity;
motor2.LPF_velocity.Tf = 0.02;
motor2.PID_velocity.I = 40;
// use monitoring with serial for motor init
// monitoring port
Serial.begin(115200);
// enable monitoring
motor1.useMonitoring(Serial);
motor2.useMonitoring(Serial);
// initialise motor
motor1.init();
motor2.init();
// align encoder and start FOC
motor1.initFOC();
motor2.initFOC();
Serial.println("Interactive gauge ready!");
_delay(1000);
}
void loop() {
// iterative setting FOC phase voltage
motor1.loopFOC();
motor2.loopFOC();
// iterative function setting the outter loop target
motor1.move(5*(motor2.shaft_velocity/10 - motor1.shaft_angle));
motor2.move(10*dead_zone(motor1.shaft_angle));
}
float dead_zone(float x){
return abs(x) < 0.2 ? 0 : x;
}