磁场定向控制算法简介 v2.0.2
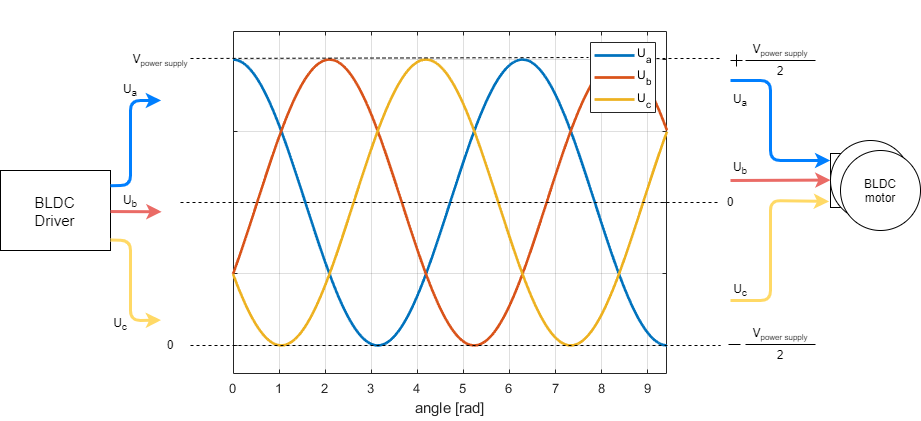
磁场定向控制算法的主要任务是接收用户定义的电压 uq,并通过持续读取电机转子位置 a,计算出合适的相电压 ua、ub 和 uc。
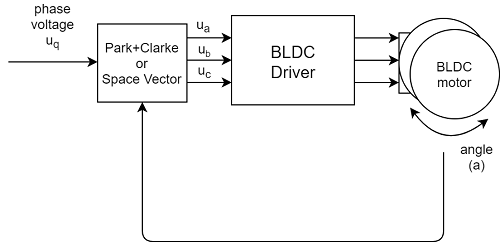
FOC 算法计算出的相电压会在电机定子中产生磁场,该磁场与转子永磁体的磁场恰好成 90 度“滞后”,从而产生推动效果。这里有一个非常棒的动画,展示了在运行名为六步调制的简化版 FOC 时,电机内部的情况。
另一种理解为什么转子和定子磁场之间需要 90 度角的方式是,回忆一下通过磁场的导线所产生的电场力方程:
F = B*I*L*sin(alpha)
其中,B 是磁场强度,L 是导线长度,I 是电流大小,alpha 是磁场 B 和电流 I 之间的夹角。从这个方程可以看出,为了获得最大力 F = B*I*L,我们需要保持 alpha 角等于 90 度或 PI/2 弧度。
如何计算合适的电压 ua、ub 和 uc
由于 SimpleFOClibrary 旨在用于 FOC 算法的教学以及支持各种应用,该库中实现了两种最标准的 FOC 调制版本。
- 正弦脉冲宽度调制:
SinePWM - 空间矢量脉冲宽度调制:
SpaceVectorPWM
你可以通过设置 motor.foc_modulation 变量来配置它们:
motor.foc_modulation = FOCModulationType::SinePWM; // default
// or
motor.foc_modulation = FOCModulationType::SpaceVectorPWM;
正弦调制 SinePWM
正弦调制基于两个变换方程。
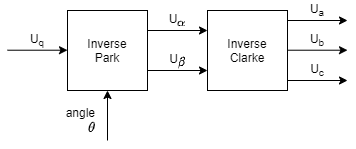
逆帕克变换:
逆克拉克变换
以下是SimpleFOC库中正弦脉冲宽度调制(Sinusoidal PWM)的实现代码:
// Method using FOC to set Uq to the motor at the optimal angle
void BLDCMotor::setPhaseVoltage(float Uq, float angle_el) {
// Sinusoidal PWM modulation
// Inverse Park + Clarke transformation
// angle normalization in between 0 and 2pi
// only necessary if using _sin and _cos - approximation functions
angle_el = normalizeAngle(angle_el + zero_electric_angle);
// Inverse park transform
Ualpha = -_sin(angle_el) * Uq; // -sin(angle) * Uq;
Ubeta = _cos(angle_el) * Uq; // cos(angle) * Uq;
// Inverse Clarke transform
Ua = Ualpha + voltage_power_supply/2;
Ub = -0.5 * Ualpha + _SQRT3_2 * Ubeta + voltage_power_supply/2;
Uc = -0.5 * Ualpha - _SQRT3_2 * Ubeta + voltage_power_supply/2;
// set the voltages in hardware
setPwm(Ua, Ub, Uc);
}
空间矢量调制 SpaceVectorPWM
空间矢量调制基于两个计算步骤:
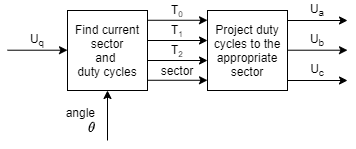
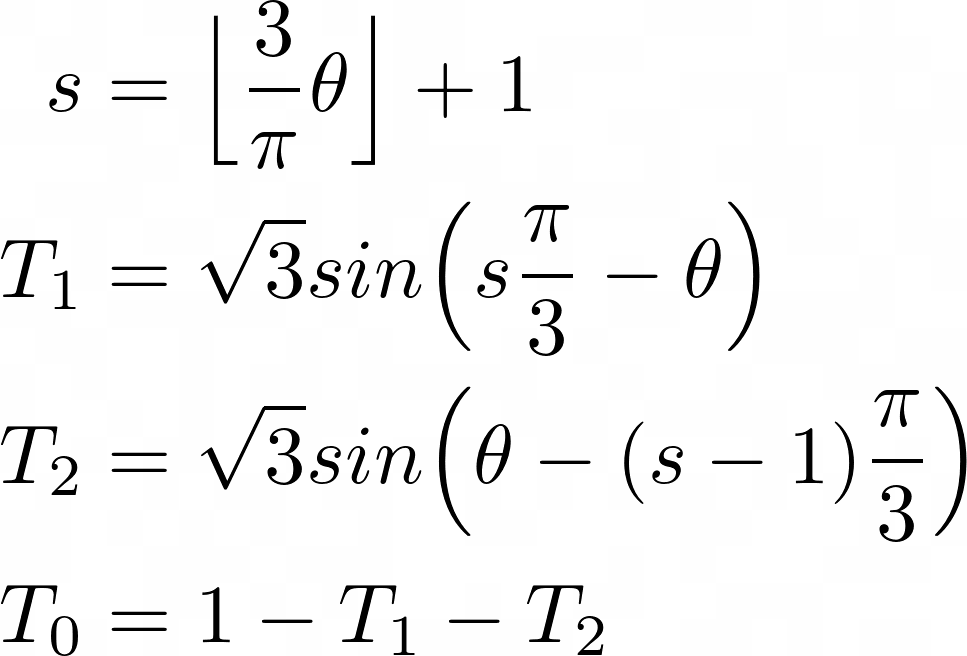
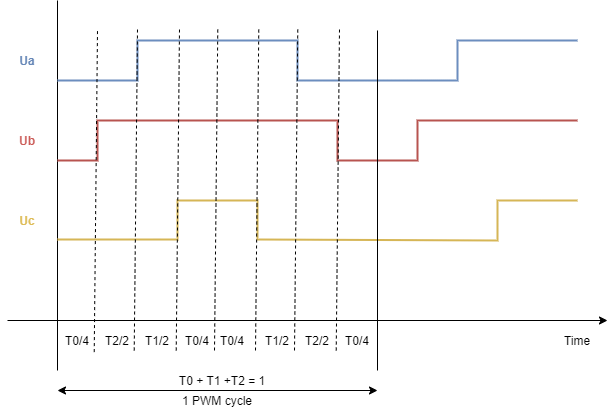
第一步,我们确定转子当前所在的扇区 s。360 度的角度被等分为 6 个 60 度的部分。所以这个计算非常直接。然后我们计算时间 T0、T1 和 T2。T1 和 T2 告诉我们相 1 和相 2 应该导通多长时间,T0 告诉我们电机应该有多长时间处于 0 电压状态。
第二步是将 T0,1,2 值投影到适当的占空比 Ta,b,c,这直接取决于电机当前所在的扇区。
| 扇区 | Ta | Tb | Tc |
|---|---|---|---|
| 1 | T1 + T2 + T0/2 | T2 + T0/2 | T0/2 |
| 2 | T1 + T0/2 | T1 + T2 + T0/2 | T0/2 |
| 3 | T0/2 | T1 + T2 + T0/2 | T2 + T0/2 |
| 4 | T0/2 | T1+ T0/2 | T1 + T2 + T0/2 |
| 5 | T2 + T0/2 | T0/2 | T1 + T2 + T0/2 |
| 6 | T1 + T2 + T0/2 | T0/2 | T1 + T0/2 |
以下是使用 SVM 表为参数生成的 pwm 信号示例:s = 2,T1 = 1/8 = 0.125,T2 = 1/8 = 0.125 和 T0 = 1/2 = 0.5
以下是SimpleFOC库中空间矢量脉冲宽度调制(Space Vector PWM)的实现代码:
// Method using FOC to set Uq to the motor at the optimal angle
void BLDCMotor::setPhaseVoltage(float Uq, float angle_el) {
// Nice video explaining the SpaceVectorModulation (SVPWM) algorithm
// https://www.youtube.com/watch?v=QMSWUMEAejg
// if negative voltages change inverse the phase
// angle + 180degrees
if(Uq < 0) angle_el += _PI;
Uq = abs(Uq);
// angle normalisation in between 0 and 2pi
// only necessary if using _sin and _cos - approximation functions
angle_el = normalizeAngle(angle_el + zero_electric_angle + _PI_2);
// find the sector we are in currently
int sector = floor(angle_el / _PI_3) + 1;
// calculate the duty cycles
float T1 = _SQRT3*_sin(sector*_PI_3 - angle_el) * Uq/voltage_power_supply;
float T2 = _SQRT3*_sin(angle_el - (sector-1.0)*_PI_3) * Uq/voltage_power_supply;
// two versions possible
// centered around voltage_power_supply/2
float T0 = 1 - T1 - T2;
// pulled to 0 - better for low power supply voltage
//float T0 = 0;
// calculate the duty cycles(times)
float Ta,Tb,Tc;
switch(sector){
case 1:
Ta = T1 + T2 + T0/2;
Tb = T2 + T0/2;
Tc = T0/2;
break;
case 2:
Ta = T1 + T0/2;
Tb = T1 + T2 + T0/2;
Tc = T0/2;
break;
case 3:
Ta = T0/2;
Tb = T1 + T2 + T0/2;
Tc = T2 + T0/2;
break;
case 4:
Ta = T0/2;
Tb = T1+ T0/2;
Tc = T1 + T2 + T0/2;
break;
case 5:
Ta = T2 + T0/2;
Tb = T0/2;
Tc = T1 + T2 + T0/2;
break;
case 6:
Ta = T1 + T2 + T0/2;
Tb = T0/2;
Tc = T1 + T0/2;
break;
default:
// possible error state
Ta = 0;
Tb = 0;
Tc = 0;
}
// calculate the phase voltages
Ua = Ta*voltage_power_supply;
Ub = Tb*voltage_power_supply;
Uc = Tc*voltage_power_supply;
// set the voltages in hardware
setPwm(Ua, Ub, Uc);
}
我应该使用哪一个?
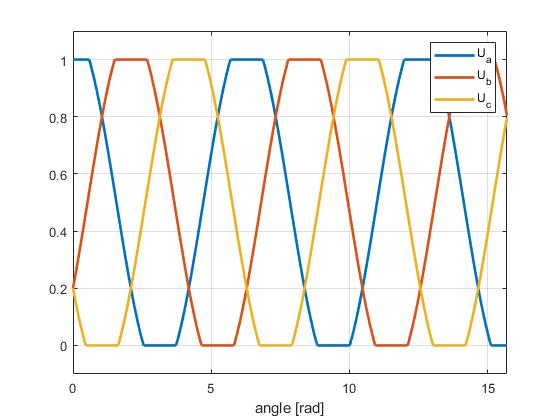
以下是正弦调制和空间矢量调制在 Uq = 0.5V 时生成的波形图像。
| 正弦 | 空间矢量 |
|---|---|
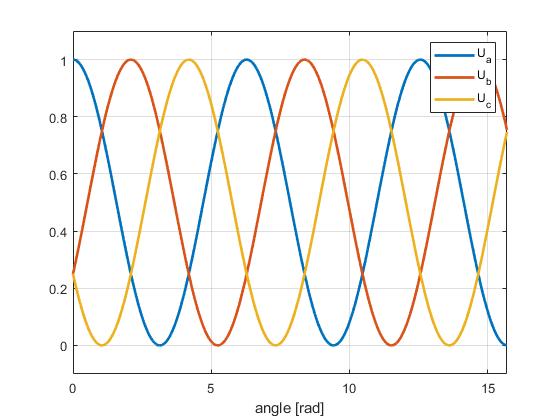 | 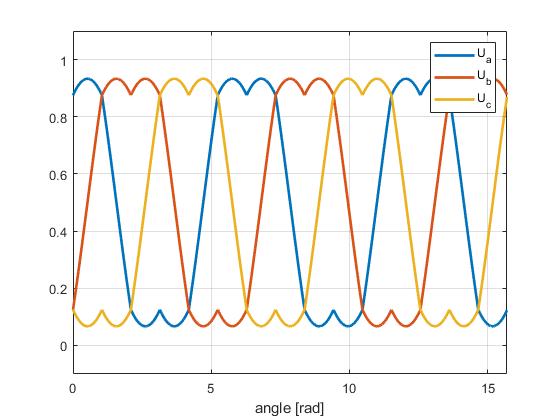 |
这两种算法之间有几个关键区别。但就 SimpleFOClibrary 而言,你只需要知道空间矢量算法能更好地利用电源的最大电压范围。在上面的表格中,你可以看到对于 Uq = 0.5V,正弦调制生成的正弦波幅度恰好等于 1,而空间矢量调制还没有达到这个程度。空间矢量产生的“双正弦”波的幅度降低了 2/sqrt(3) = 1.15 倍,这意味着使用相同的电源,它可以向电机输送 15% 更多的功率。
这意味着,对于你的电源电压 Vpower_supply,当使用 SinePWM 时,你能够设置的最大 Uq = 0.5 Vpower_supply ,而如果使用 SpaceVectorPWM,你能够设置的最大 Uq = 0.58 Vpower_supply
电源电压 Vpower_supply 你应该通过更改参数 motor.voltage_power_supply 的值来指定。默认值设置为 12V。如果你将 Vpower_supply 设置为其他值,请在此处更改,以便 FOC 算法适应适当的 Uq(motor.voltage_q)值。
// power supply voltage
motor.voltage_power_supply = 12;
如果我不指定这个参数会怎样?
如果你不设置motor.voltage_power_supply,算法仍然会工作,但你的motor.voltage_q值将不再等于实际输出电压。
当我超过最大 Uq 时会发生什么?
如果你尝试将电压 Uq 设置为高于 SinePWM 的 Uq = 0.5 Vpower_supply 或 SpaceVectorPWM 的 Uq = 0.58 Vpower_supply ,它仍然会工作,但 Ua,b,c 信号将会饱和。
以下是不同 Uq 值下 SinePWM 的几张图像。
| Uq = 0.5 Vpower_supply | Uq = 0.6 Vpower_supply | Uq = Vpower_supply |
|---|---|---|
|  | 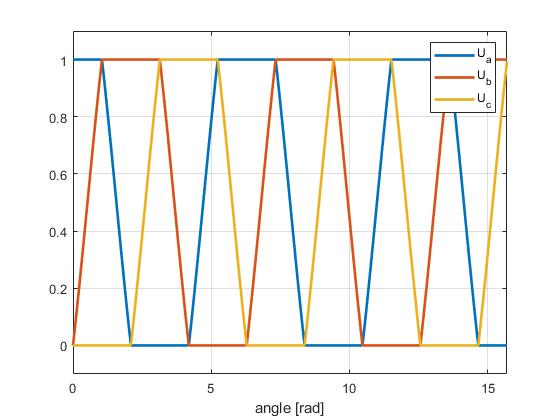 |
基本上,你在图像上可以看到,Ua,b,c 已经饱和,并且在超过最大值后,你实际上不再向电机设置正弦波了。 电机仍然会获得一些功率增加,但不再是线性或平滑的。
经验法则
实际上,电机在 Uq ~ 0.7 Vpower_supply 之前都能察觉到差异。超过这个值后,Ua,b,c 过于饱和,进一步增加 Uq 不会导致电机功率增加。 但是每个电机都略有不同,你可以轻松地凭经验检查这些值。只需将电机置于电压控制下,观察在电压 Uq 的哪个值之后,你再也看不到电机功率的提升(它会停止加速)。
进一步阅读
有关初始化过程、实时执行和实现细节的更多信息,请访问 FOC 实现文档。