Connecting the hardware
Connecting the SimpleFOCMini to the microcontroller, BLDC motor and power-supply is very straight forward.
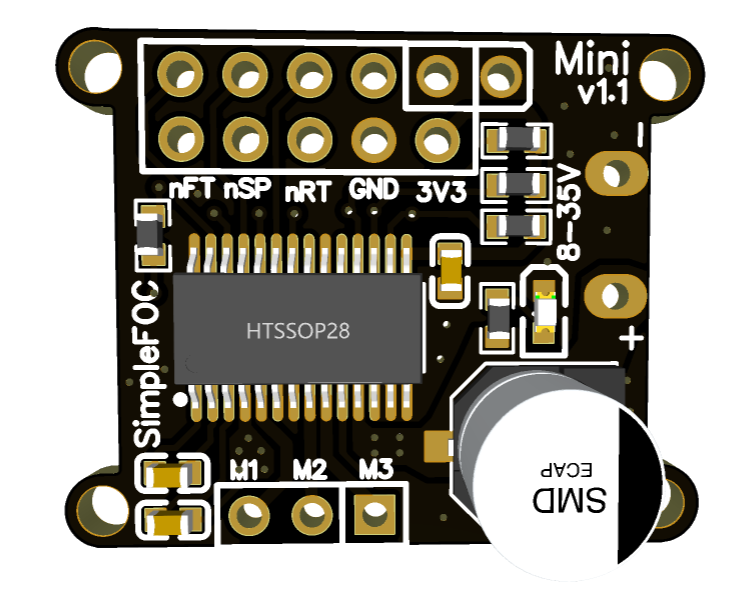
There are two versions of the SimpleFOCMini board, v1.0 and v1.1. The versions are functionally identical, but thy do differ in pin order.
They are easy to distinguish:
- You can easily see the board version indicated on the silkscreen on the board.
- v1.1 has double GND pins on the first line of the header, while v1.0 has a single GND pin on the first line of the header.