On this page
Torque/FOC control loop
BLDC motors Stepper motors Hybrid Stepper motors
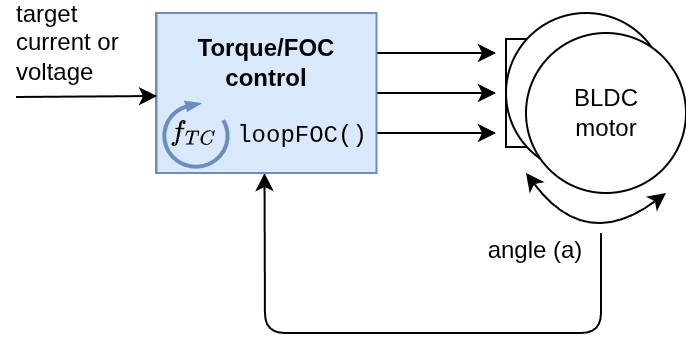
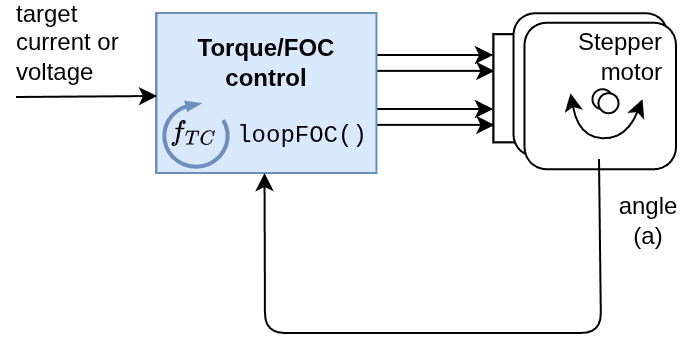
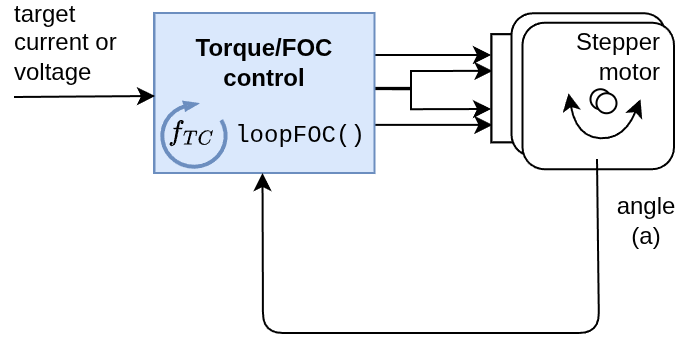
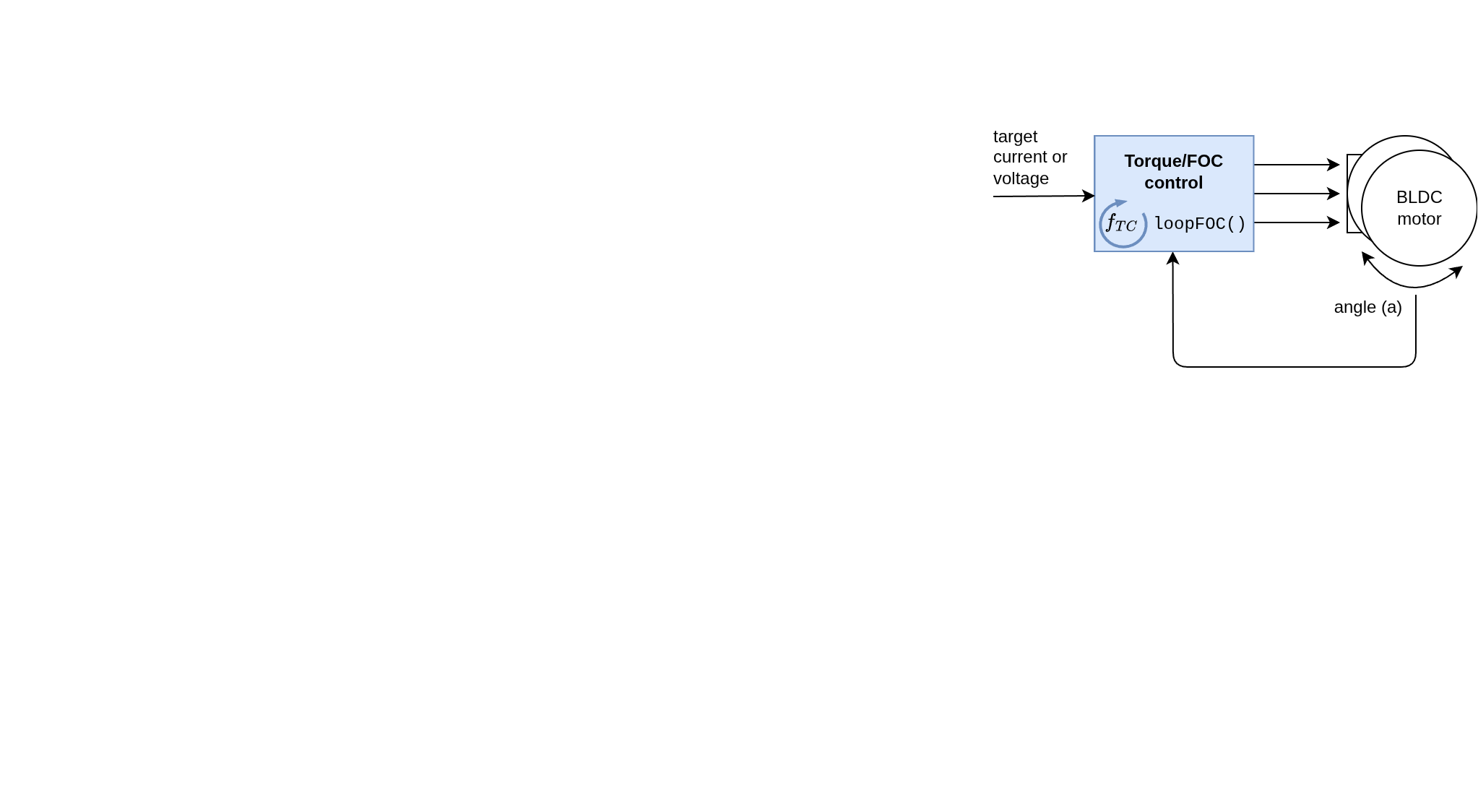
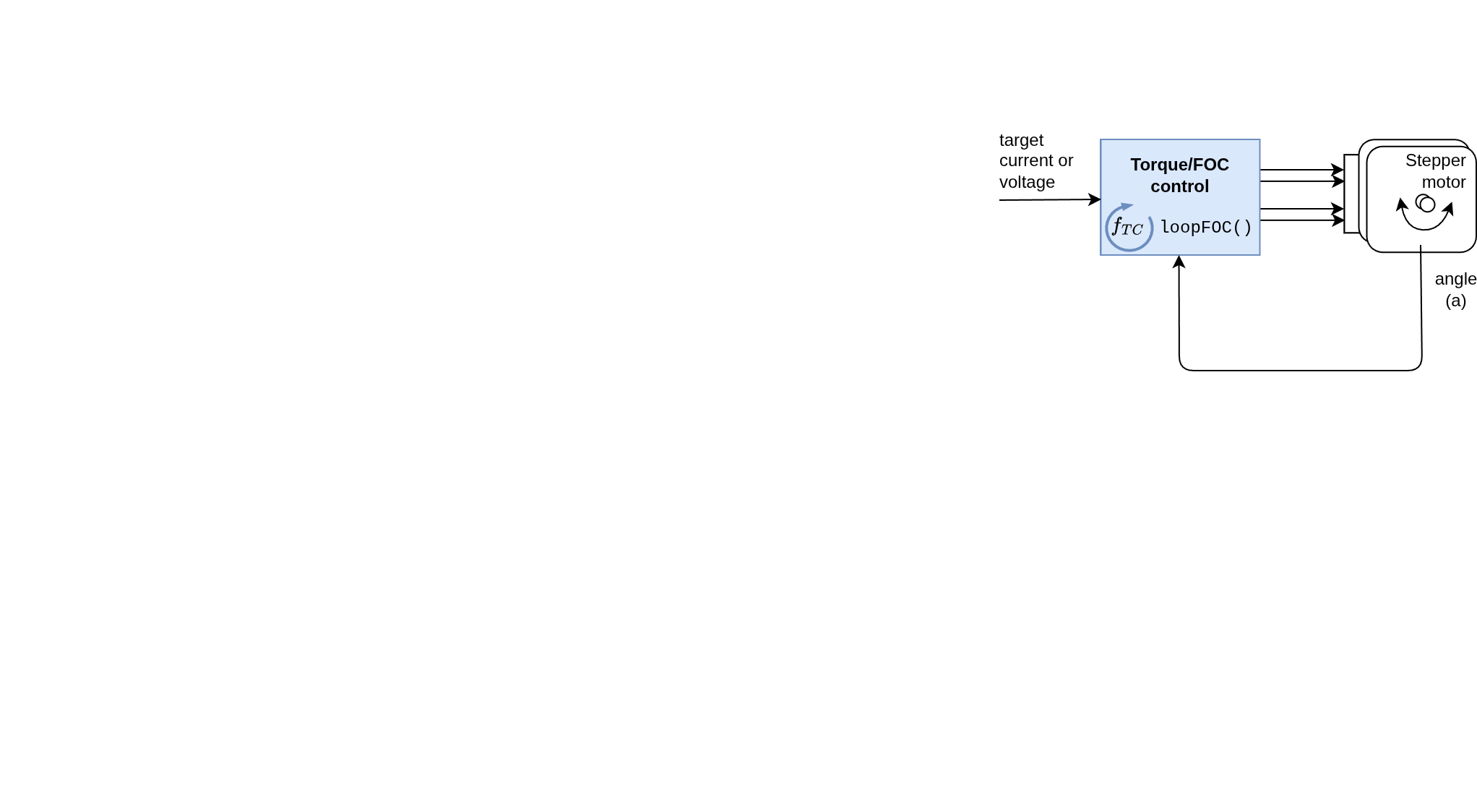
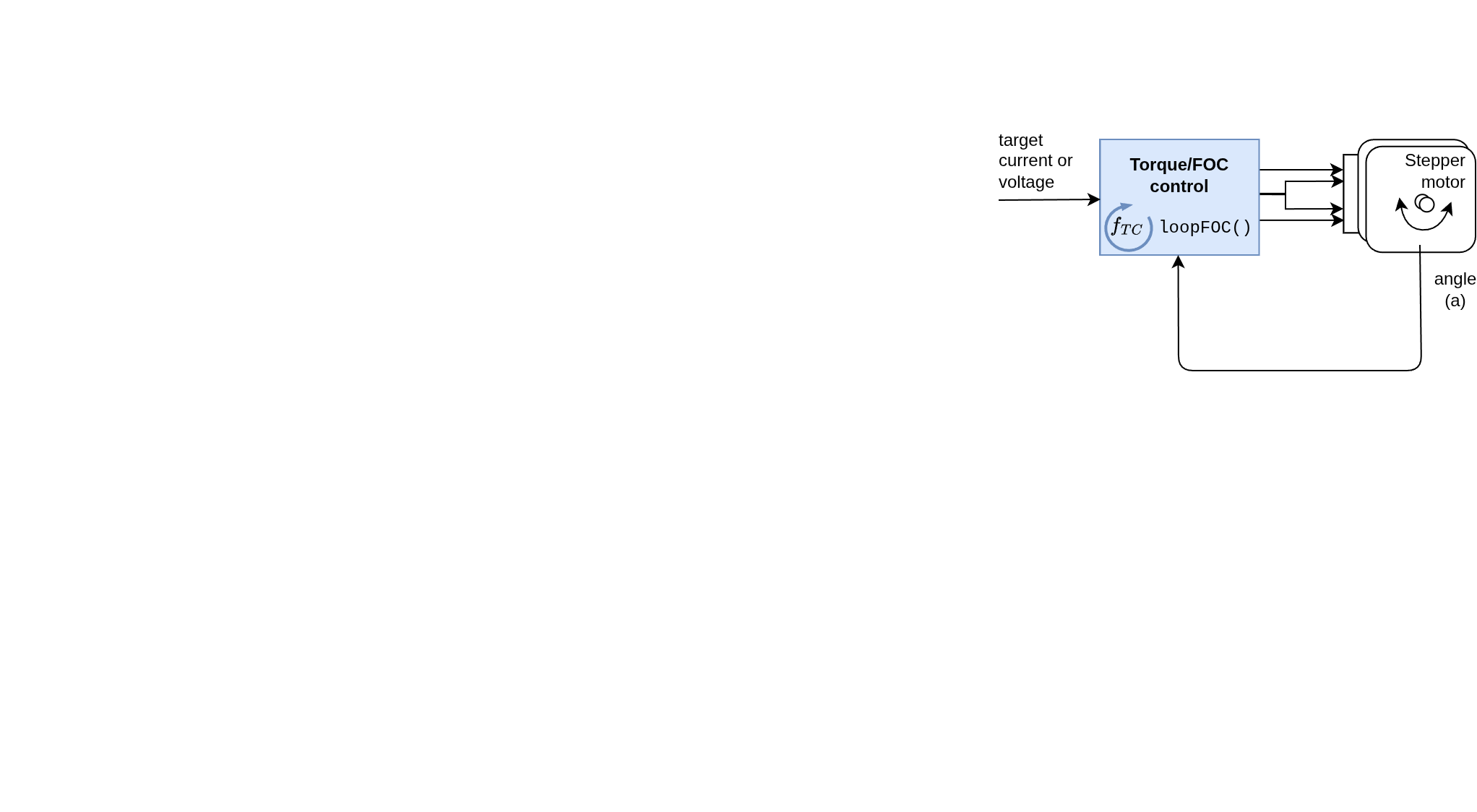
FOC or torque control is the lowest level control loop of the SimpleFOClibrary. It is the base of all the other control loops and it is responsible for controlling the torque of the motor. This control loop is implemented in the motor.loopFOC() function of the motor class and it is executed at the highest frequency \(f_{TC}\) possible (usually well above 1kHz, depending on the MCU performance).
This control loop allows the user to set the target torque (voltage or current) determines the optimal phase voltages to be applied to the motor in order to achieve it.
Torque control modes
There are four torque control types implemented in the SimpleFOClibrary:
- Voltage mode -
voltage - Estimated current mode -
estimated_current - DC current mode -
dc_current - FOC current mode -
foc_current
And they can be set by changing the motor attribute torque_controller.
// set torque mode to be used
// TorqueControlType::voltage ( default )
// TorqueControlType::estimated_current
// TorqueControlType::dc_current
// TorqueControlType::foc_current
motor.torque_controller = TorqueControlType::foc_current;
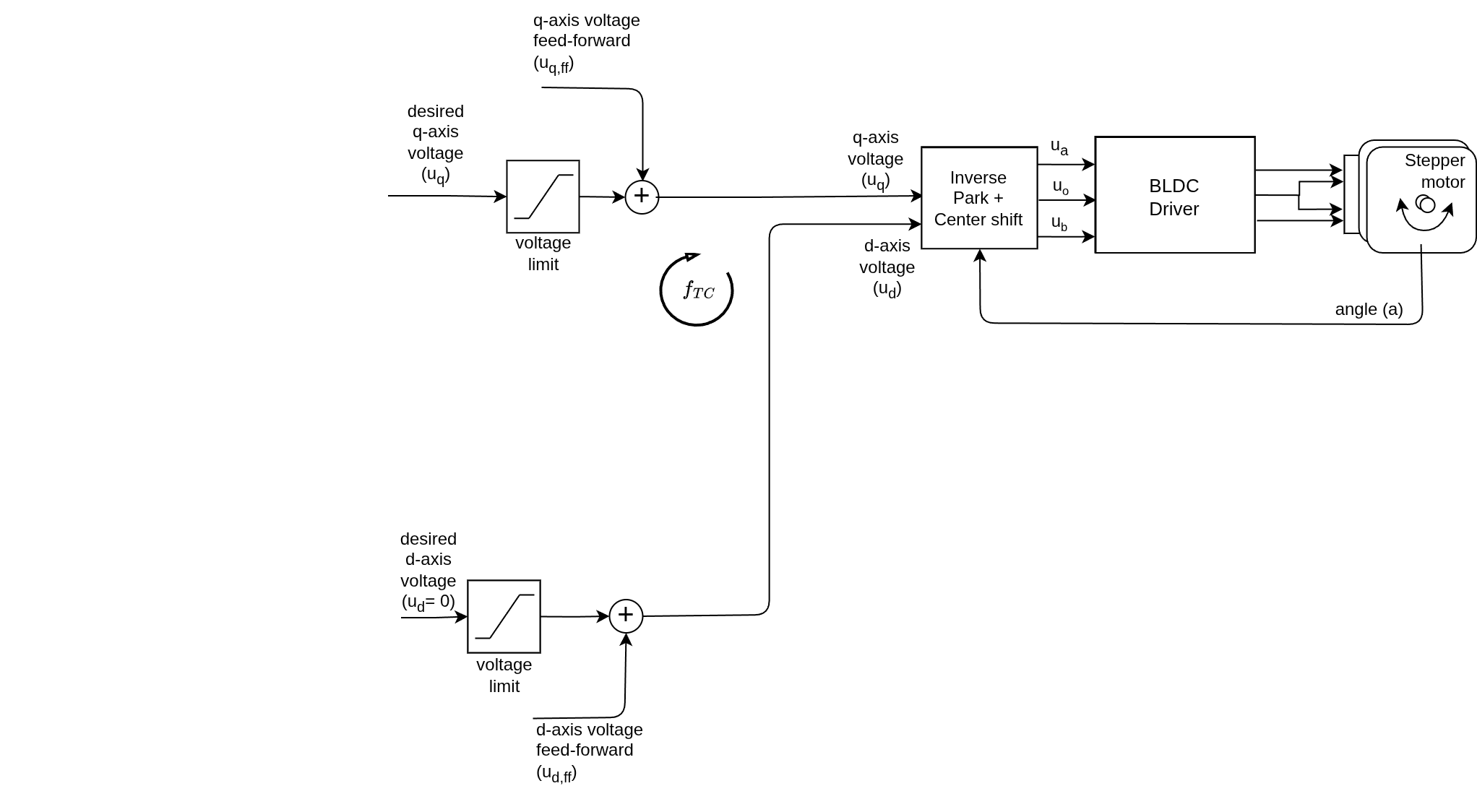
Here is the quick comparison of the block diagrams of the different torque control types:
Choose the motor type:
BLDC motors Stepper motors Hybrid Stepper motors
Choose the voltage control type:
FOC current mode DC current mode Estimated current Voltage mode Conceptual
Which torque control type should I use?
The choice of the torque control type depends on the specific application, the hardware available and the performance requirements.
In short: Voltage mode is the universal starting point. Estimated current is the high-performance upgrade for those without sensors. FOC current is the gold standard for true torque control. DC current is for special cases or low-power MCUs with current sensing, but it is generally not recommended.
RULE OF THUMB:
- Gimbal Motors (High Resistance \(R>5\Omega\)):
- Low speed/Low-power MCU \(\to\) Voltage mode.
- High speed \(\to\) Estimated current (if parameters known) or FOC current (if current sensing available).
- Drone Motors (Low Resistance \(R<1\Omega\)):
- Always prefer FOC current (if current sensing available)
- Otherwise use Estimated current (if you can get hold of motor parameters)
- ⚠️ Warning: Use Voltage mode only when no other choice and with very low limits to avoid frying your hardware.
- Stepper Motors (Moderate Resistance \(R \approx 2\Omega\)):
- Low-speed applications or when simplicity is key: Voltage mode
- For better performance at higher speeds, Estimated current (if you have the motor parameters).
- If current sensing available all speeds, FOC current is ideal.
- DC Current Mode (Special Cases):
- Use if you have current sensors but a slow MCU (e.g., Atmega328).
- Use if your sensor only measures total current magnitude.
| Torque Mode | Current control | High Speed Performance | Low Speed Performance | MCU performance Required | Requirements | Best For… |
|---|---|---|---|---|---|---|
| Voltage | ❌ None | ❌ Poor (BEMF limits torque) | ✔️ Excellent (Very smooth) | Low | None | Beginners, Gimbal motors, and low-speed testing. |
| Estimated Current | ⚠️ Estimated (Model-based) | ✔️ Good (BEMF + lag compensation) | ✔️ Excellent (Smooth & Quiet) | Low / Moderate | Phase resistance (\(R\)), KV rating (\(KV\)) and inductance (\(L_q, L_d\)) | High-speed motors without current sensors (Drone motors). |
| DC Current | ✔️ Precise (Magnitude) | ⚠️ Moderate (Phase lag) | ⚠️ Moderate (Commutation noise) | Moderate | Current Sensing hardware | Low-performance MCUs where current limiting is required. |
| FOC Current | ✔️ Precise (Vector) | ✔️ Excellent (Optimal timing) | ✔️ Excellent (True torque) | High | Current Sensing hardware | Professional apps, high-dynamic robots, and true torque control. |
📊 Click here for a bit about the torque control types
Torque control type Pros Cons Voltage ✔️ Very simple and fast
✔️ Good performance with any MCU
✔️ Very smooth on low speeds
✔️ No current sense needed❌ Not optimal on high speeds
❌ Cannot control true current draw
❌ Torque is approximated (low error on low speeds)Estimated current ✔️ More efficient than voltage mode on higher speeds
✔️ Can achieve full speed of the motor
✔️ Much better backdrivability (close to the true torque control)
✔️ Can control and limit estimated current draw
✔️ No current sense needed❌ Needs motor parameters to be set
❌ Sensitive to wrong motor parameters (the difference between the estimated and real current can become big if the motor parameters are not set correctly)DC current ✔️ Can control true current draw
✔️ Suitable for low performance MCUs
✔️ Current limiting❌ More complex to execute than both voltage and estimated current modes (slower)
❌ Can achieve lower speeds than both voltage and estimated current modes
❌ Torque is approximated (high error on high speeds)
❌ Needs current sensingFOC current ✔️ True torque control (any velocity)
✔️ Can control true current draw
✔️ Very efficient on higher velocities
✔️ Current limiting❌ The most complex to execute (slowest)
❌ Not suitable for low-performing MCUs (can become unstable)
❌ Needs current sensing
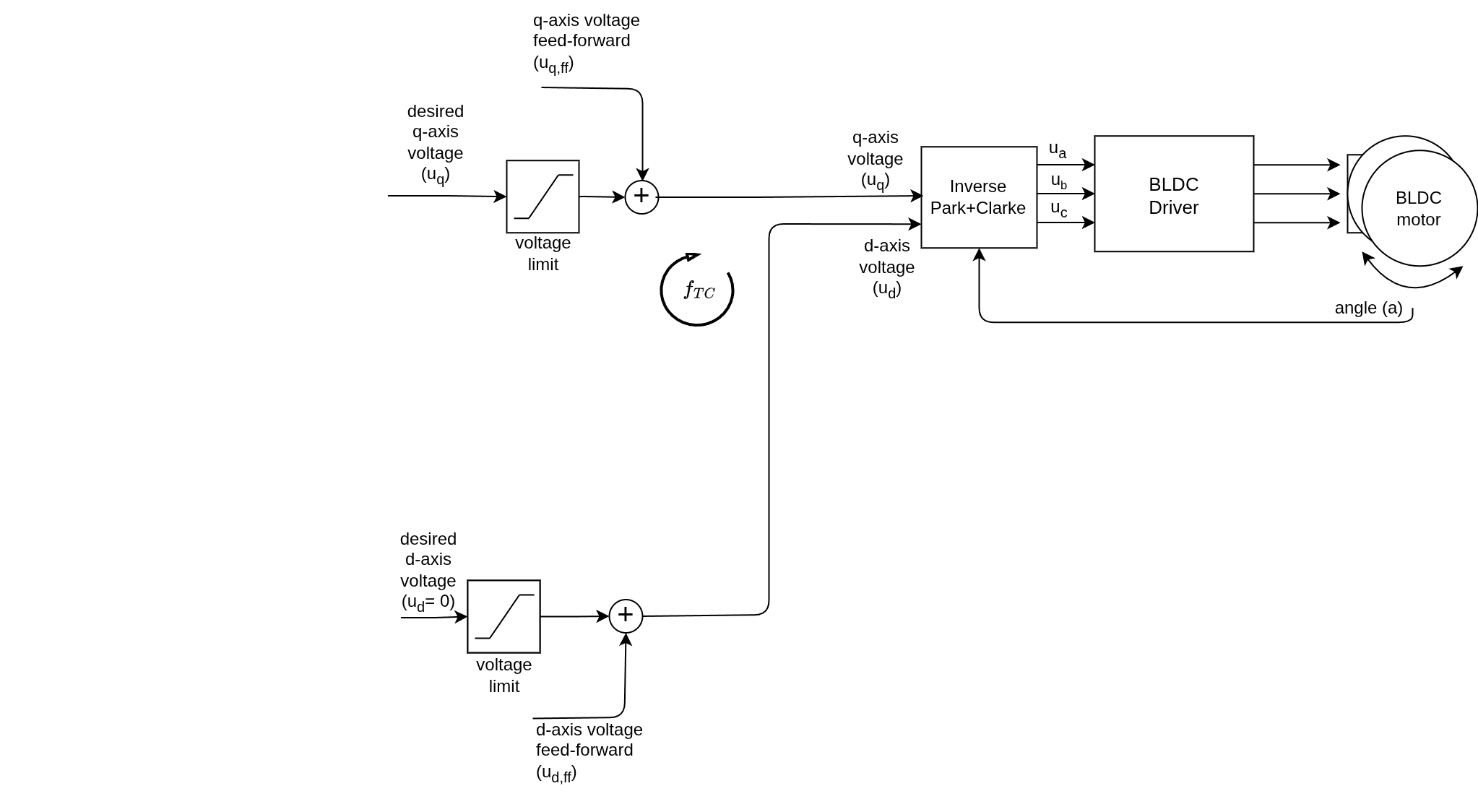
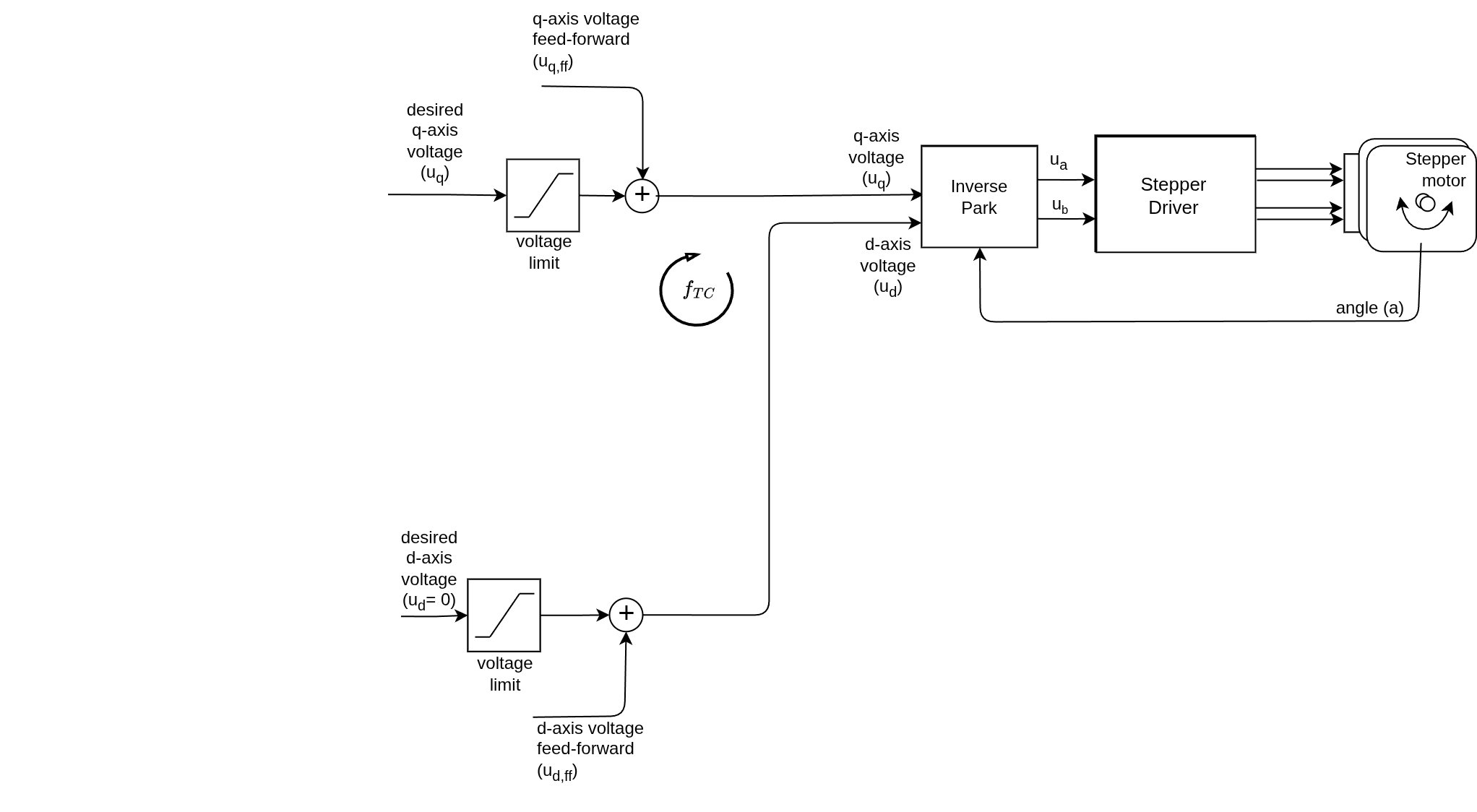
Voltage mode - voltage
Torque control through voltage is the most basic torque control type, and it provides you an abstraction of the BLDC/Stepper motor so that you can control it as a DC motor. It is based on the principle that the current is directly proportional to the voltage (it neglects the current dynamics) and therefore does not need any current sensing hardware. For more info about this approach, visit our digging deeper section.
Configuration parameters
- No algorithm parameters
- Voltage limit is set by
motor.voltage_limitparameter and it is recommended to be set to a lower value than the maximum voltage the driver can provide in order to avoid overheating of the motor and driver.
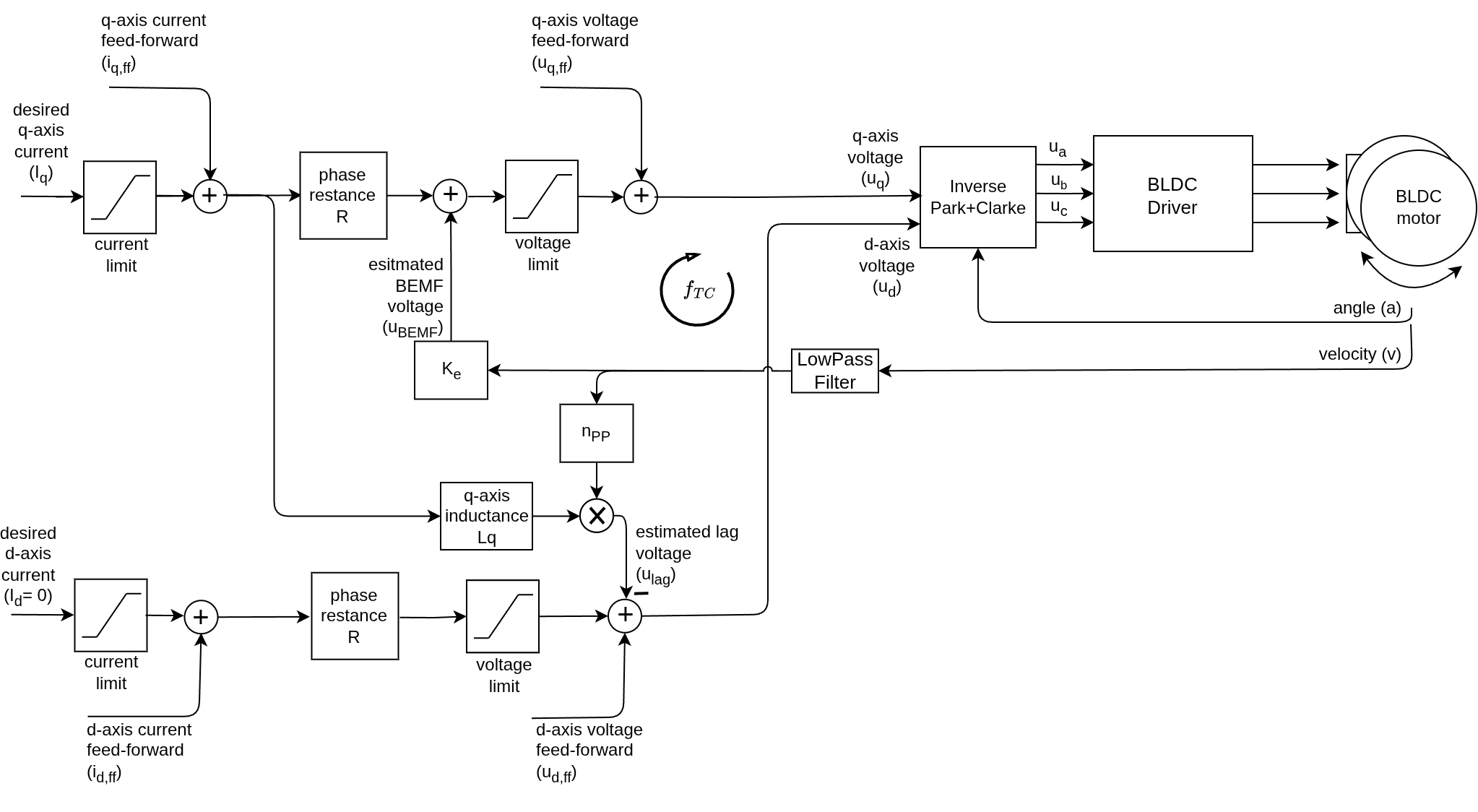
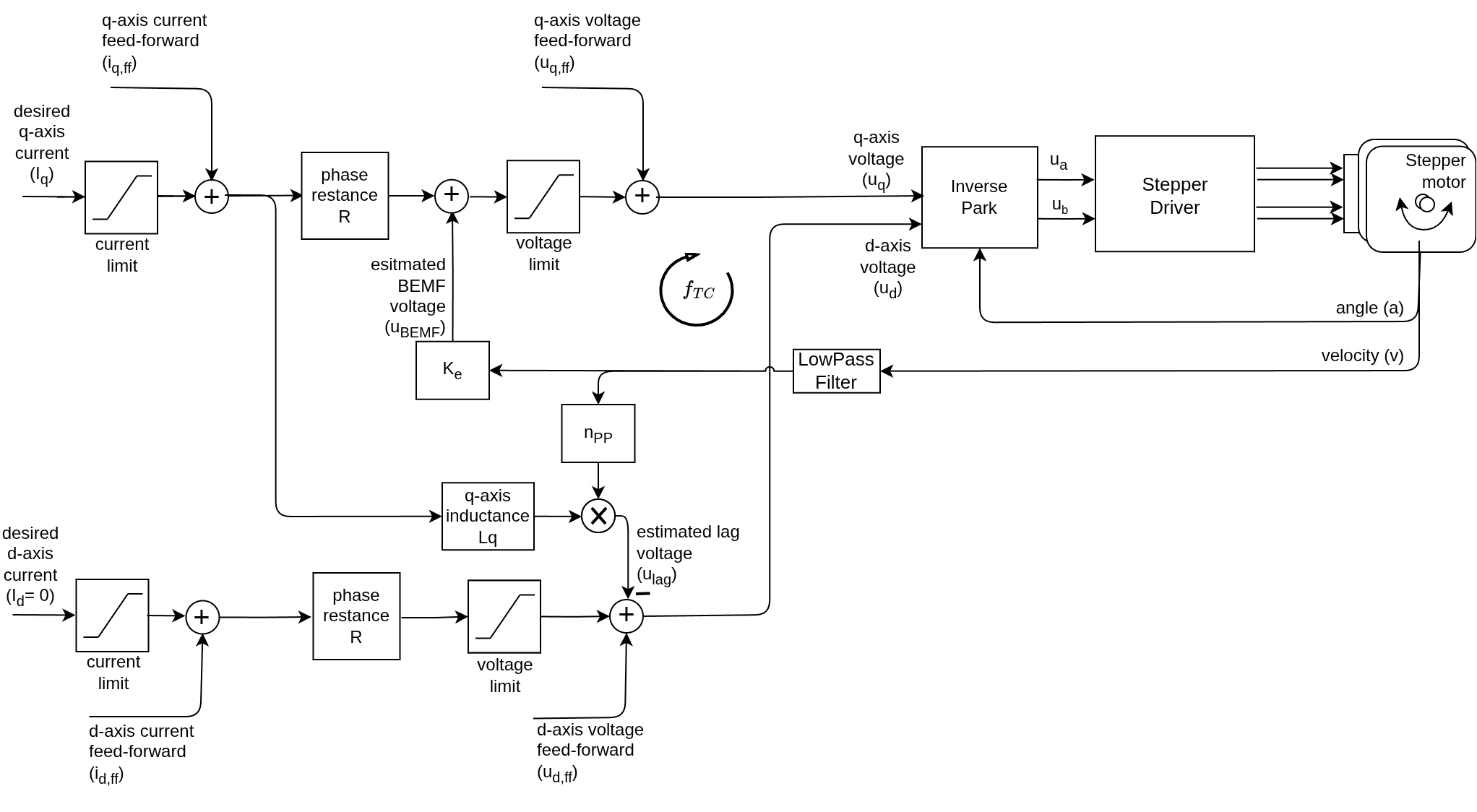
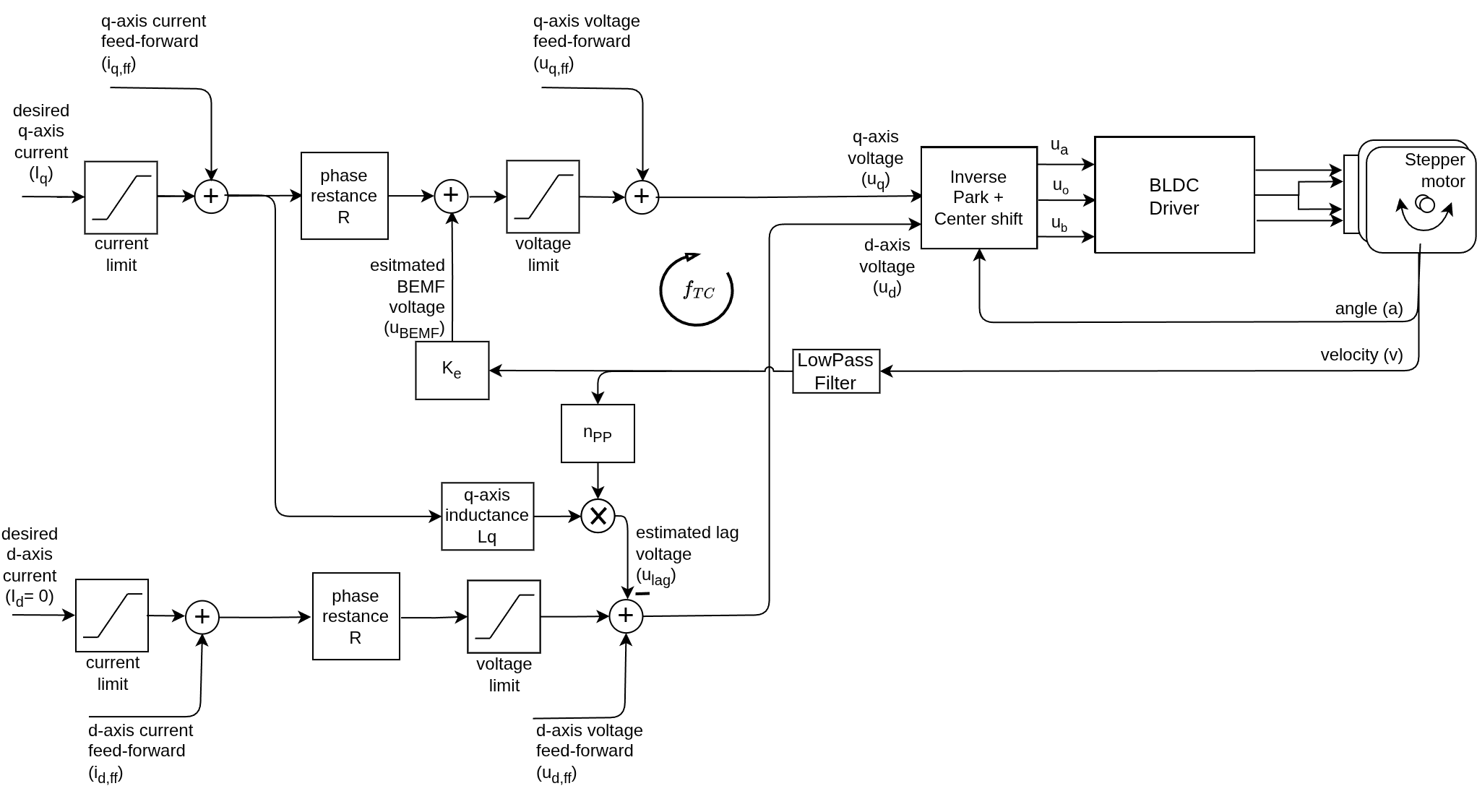
Estimated current mode - estimated_current
This mode uses the motor’s physical parameters: Phase Resistance (\(R\)), KV rating (\(KV\)) and axis inductance (\(L_q, L_d\)) to estimate the current draw without physical sensors. It is significantly more efficient than raw voltage mode because it accounts for back-EMF and phase lag, ensuring the torque remains consistent even as the motor speeds up. It is the recommended mode when current sensing hardware is not available, especially for higher-KV drone motors.
Configuration parameters
- Motor parameters: Phase Resistance (\(R\)), KV rating (\(KV\)) and axis inductance (\(L_q, L_d\)) need to be set for the motor.
- Current limit is set by
motor.current_limitparameter and it is recommended to be set to a lower value than the maximum current the driver can provide in order to avoid overheating of the motor and driver. - Low pass filter time constant
LPF_velocity.Tfif velocity feedback in noisy.
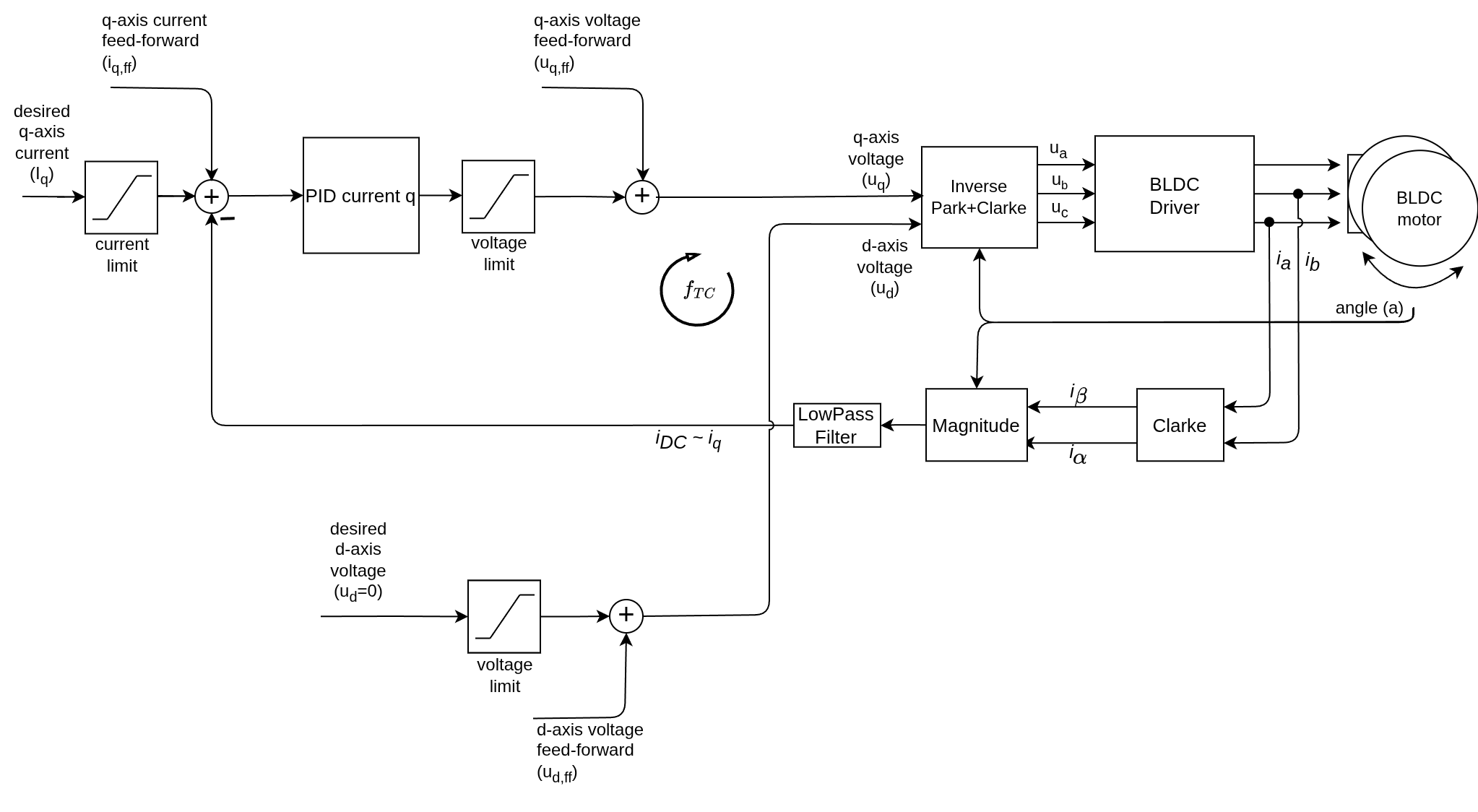
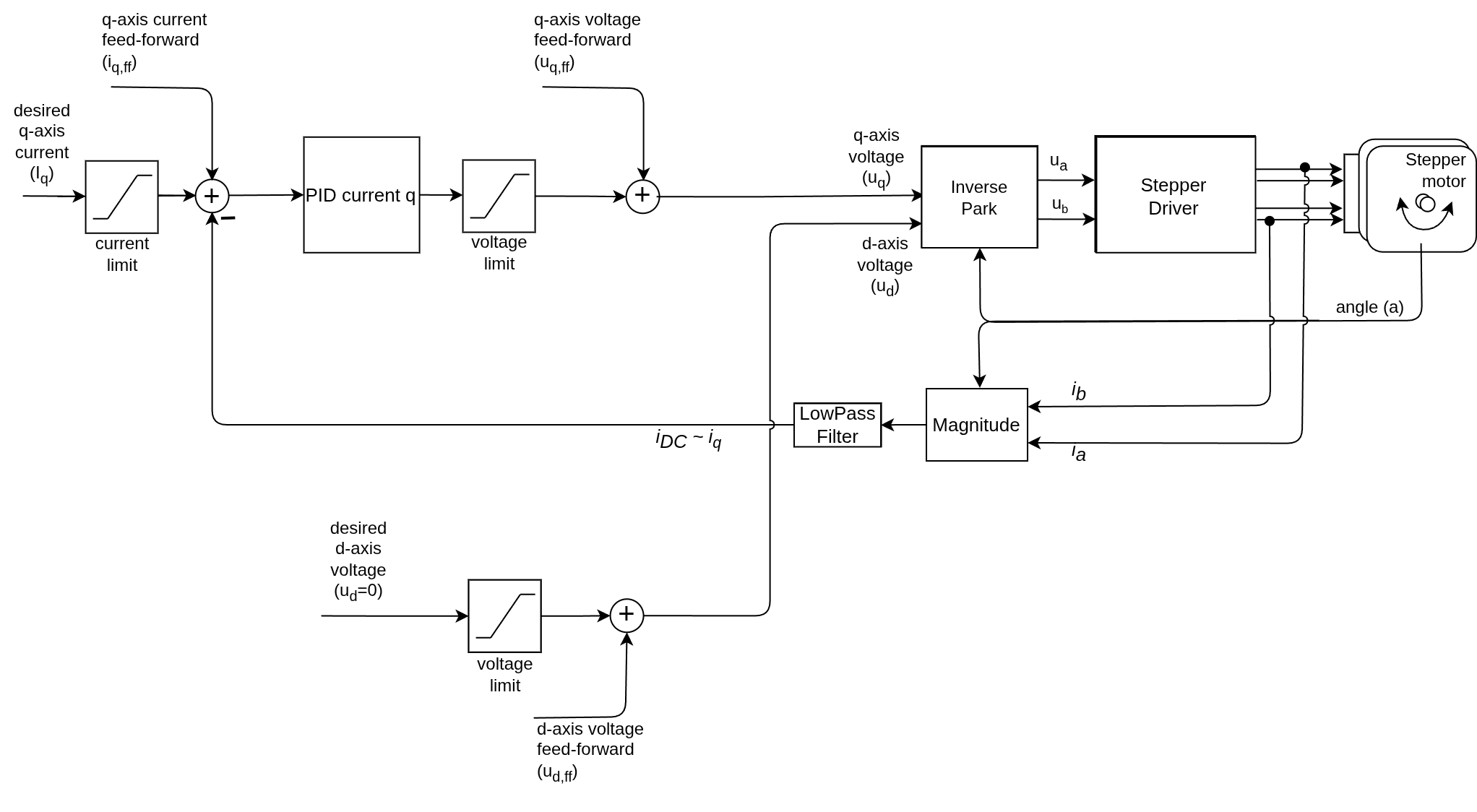
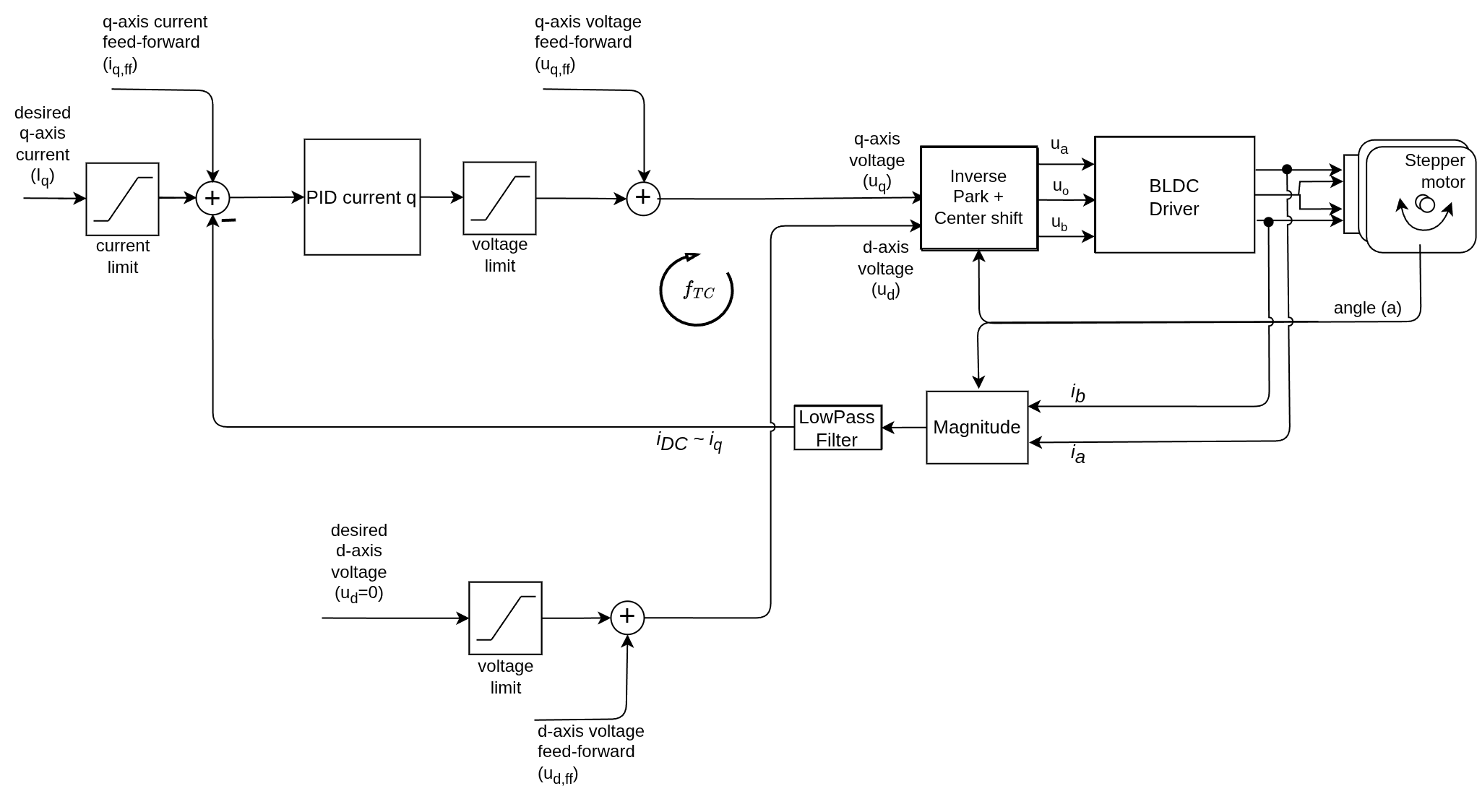
DC current mode - dc_current
DC current control mode enables you to control the current of the BLDC/Stepper motor as if it was a DC motor. Current sensing is used to obtain an overall magnitude of the current the motor is drawing and its direction, and the assumption is that the torque is proportional to the overall current. The benefit of this approach is that the true current set to the BLDC/Stepper motor can be controlled very precisely it is a bit faster and more stable to execute for less-performant microcontrollers (such as Atmega328 family).
Configuration parameters
- Current sensing hardware is required to be able to use this mode.
- Current limit is set by
motor.current_limitparameter and it is recommended to be set to a lower value than the maximum current the driver can provide in order to avoid overheating of the motor and driver. - PID controller parameters of
PID_current_qneed to be tuned for the specific motor and setup. - Low pass filter time constant
LPF_current_q.Tfneeds to be tuned for the specific motor and setup as well, especially if the current feedback is noisy.
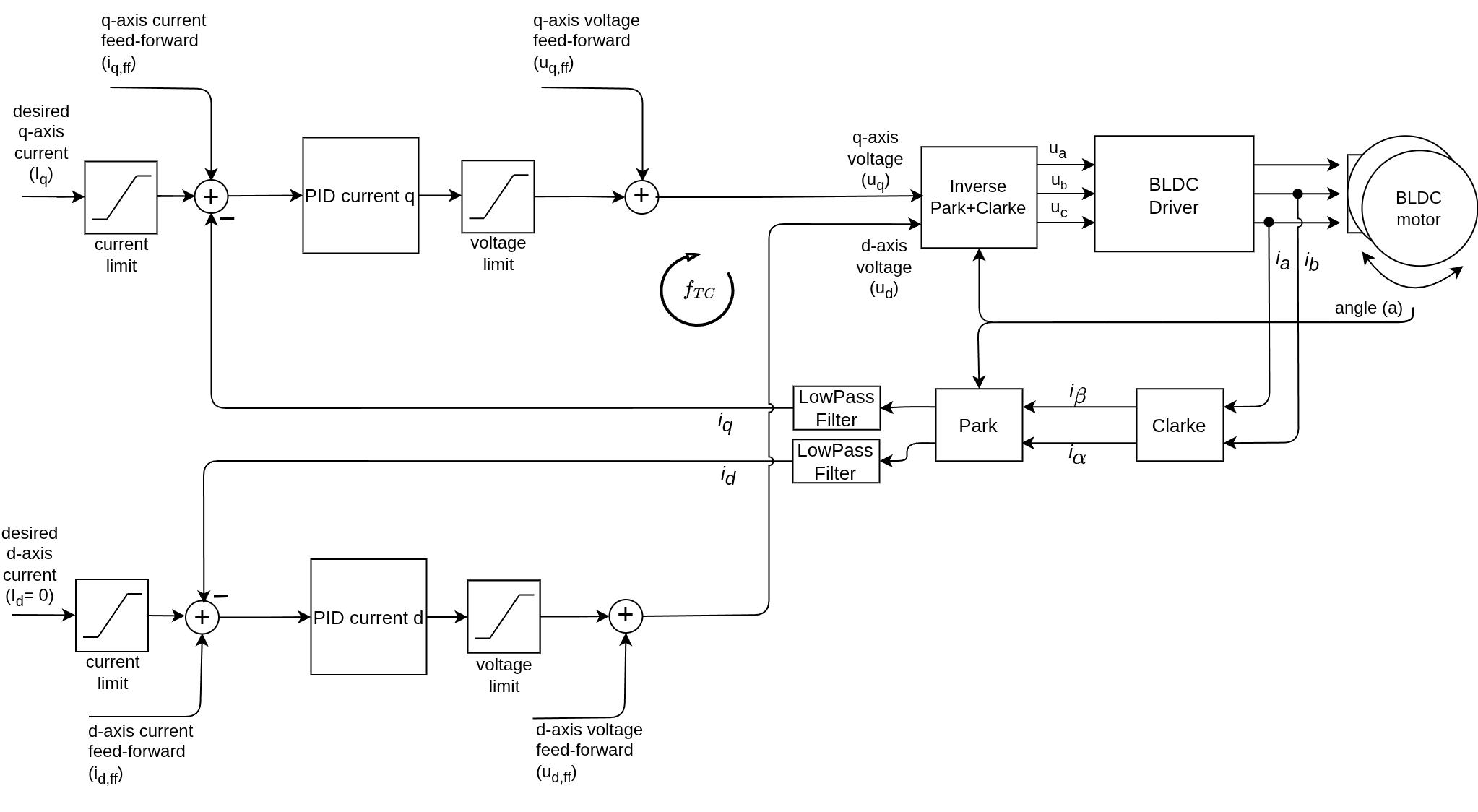
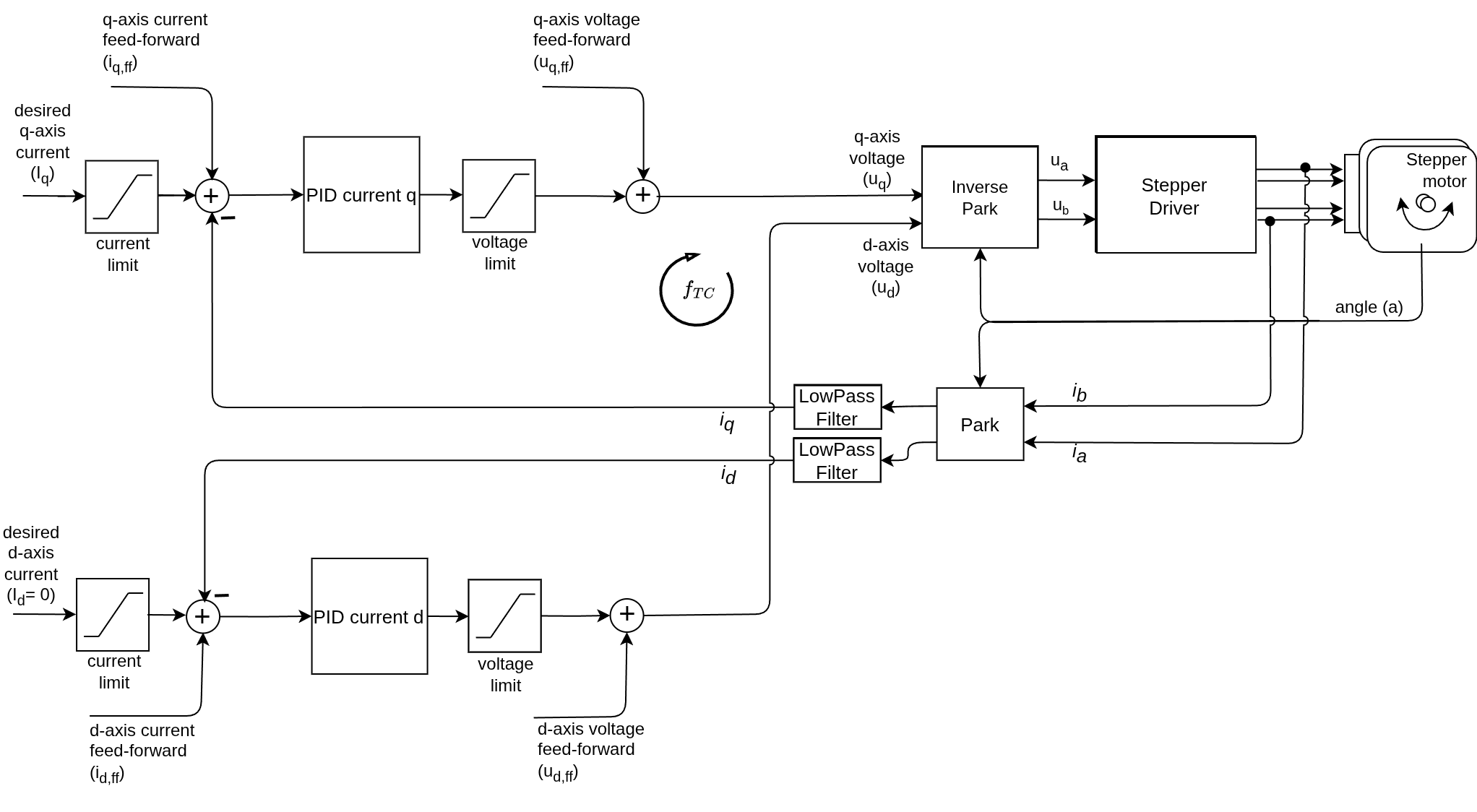
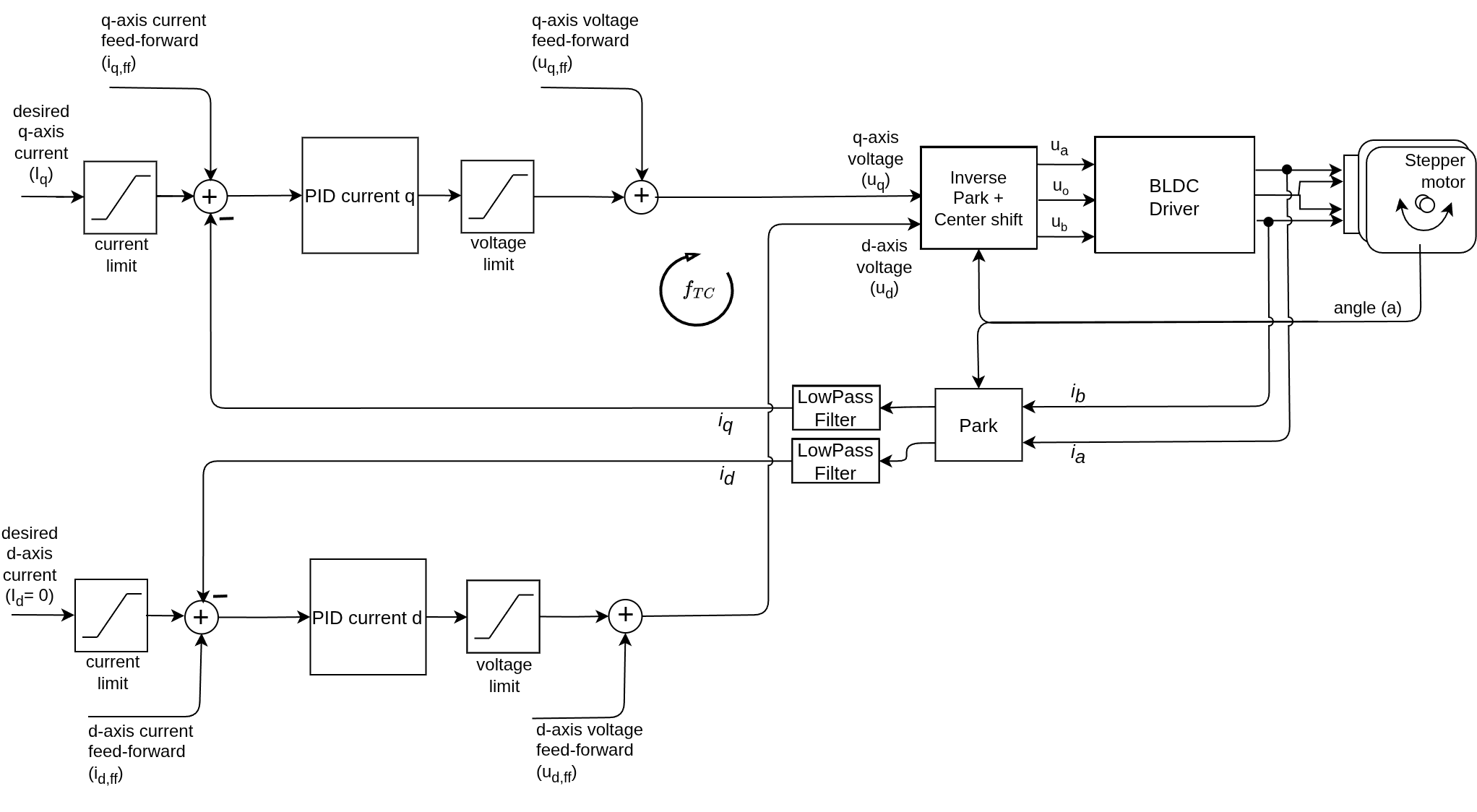
FOC current mode - foc_current
FOC current control is the only true torque control approach. It controls two components of the current vector q and d. The torque is assumed to be proportional to the q current component and the d component of the current is controlled to remain equal to 0.
Configuration parameters
- Current sensing hardware is required to be able to use this mode.
- Current limit is set by
motor.current_limitparameter and it is recommended to be set to a lower value than the maximum current the driver can provide in order to avoid overheating of the motor and driver. - PID controller parameters of
PID_current_qandPID_current_dneed to be tuned for the specific motor and setup. - Low pass filter time constant
LPF_current_q.TfandLPF_current_d.Tfneeds to be tuned for the specific motor and setup as well, especially if the current feedback is noisy.
Related topics
See here for a dive deep into the torque theory. Go here for the implementation details.