On this page
SimpleFOCWebController by @geekuillaume
This is a controller interface for the SimpleFOClibrary. It uses WebSerial to communicate with a suitable micro-controller using serial port communications and the Commander interface.
Most of the code for this application was provided by @geekuillaume, his github repository can be found here and his application can be found here. Our app is a fork of his code, that has been further extended to support more devices and configuration parameters, as well as to ease the monitoring visualisation.
Github repo Open SimpleFOCwebcontroller
📢 Early stage project
This project is still in its early stage, we are counting on your patience and looking forward to hear your feedback. As there are many people in the community with far more knowledge about these kinds of apps than we do, don't hesitate to leave the issues and do the pull requests.
Features:
- Plug and play with the SimpleFOClibrary version 2.3+
- Real-time tuning and configuration of the motors
- Real-time plotting and monitoring of motor variables
- Support for multiple motors
Using the SimpleFOCWebController
SimpleFOCWebController does not require any installation, its only requirement is that your browser has WebSerial support. Check the supportedd browsers here.
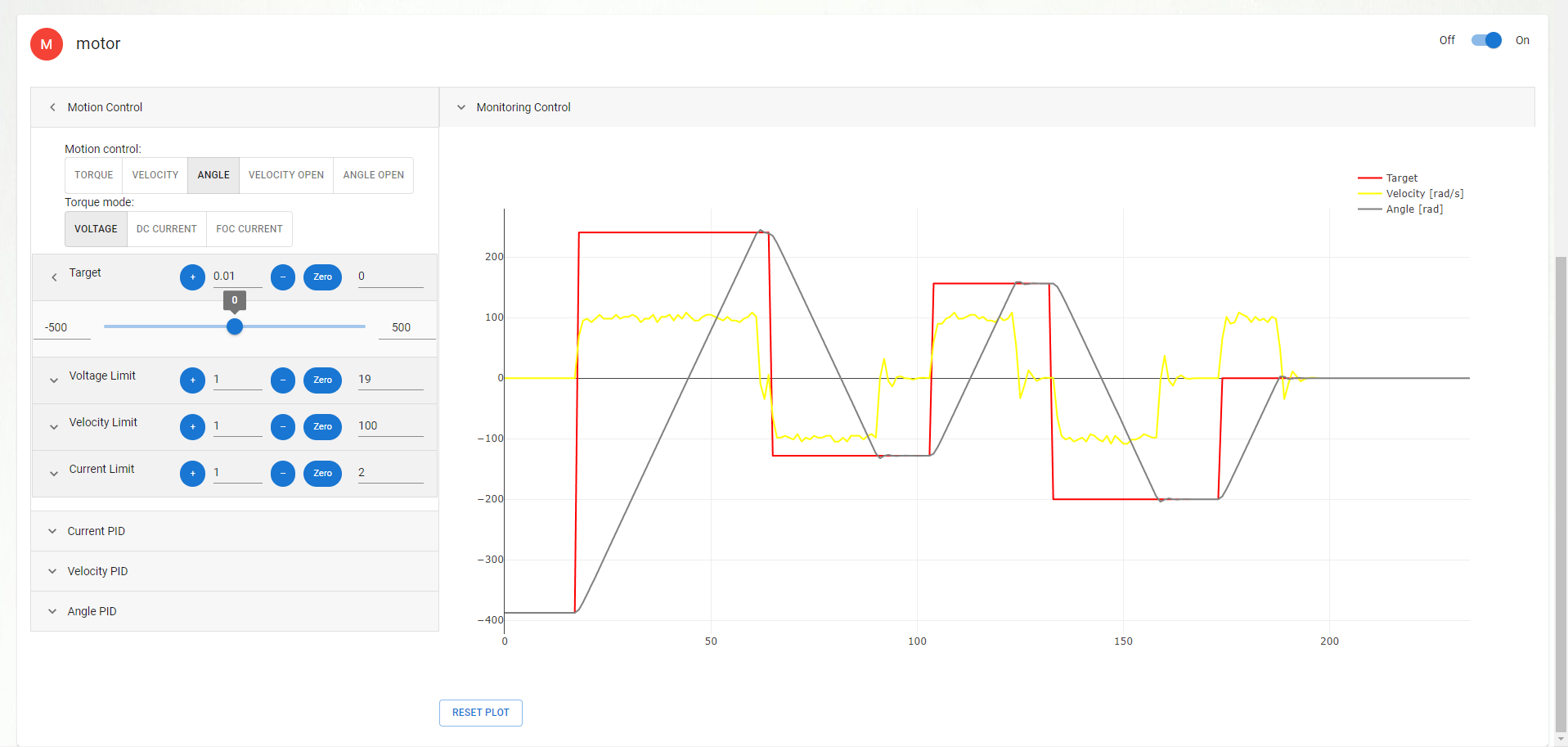
Motion control tunning blocks
Once you have your application running in your browser, connected to your microcontroller running the SimpleFOClibrary. You can easily change most of the control parameters of different motion control loops and visualise different monitored variables.
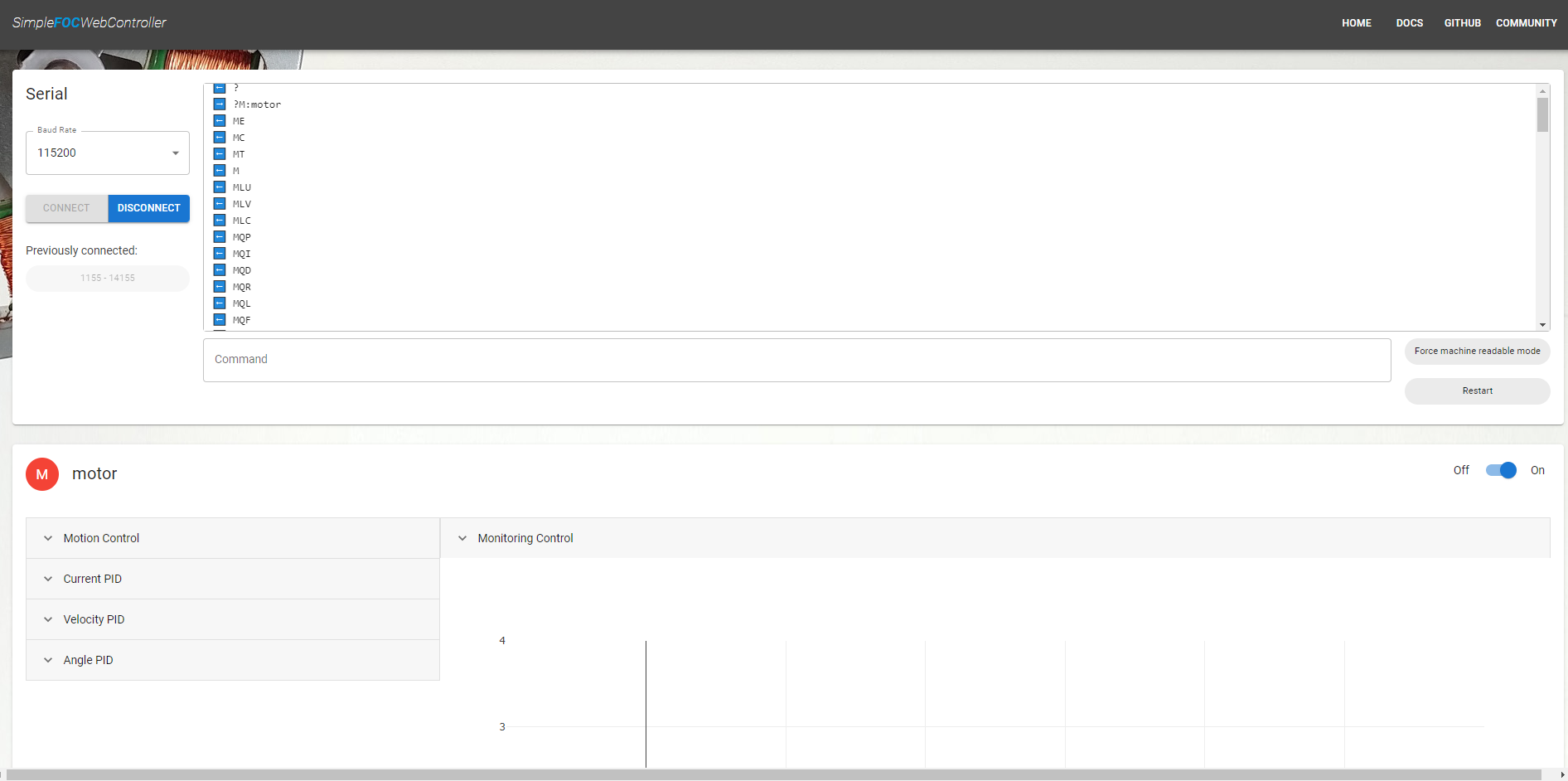
Integrated serial terminal
SimpleFOCWebController also has integrated serial terminal for easier debugging and monitoring.
Arduino code
Basically there are three things you need to do:
- Use the commander interface and add the motor to the commander
- Use the monitoring and add the
motor.monitor()in the loop - Make set the
motor.monitor_start_charandmotor.monitor_end_charto the same character as the motor id added to the commander
Here is a mockup of the code:
#include <SimpleFOC.h>
....
// include commander interface
Commander command = Commander(Serial);
void doMotor(char* cmd) { command.motor(&motor, cmd); }
void setup(){
....
// add the motor to the commander interface
// The letter id (here 'M') of the motor
char motor_id = 'M';
command.add(motor_id,doMotor,"motor");
// tell the motor to use the monitoring
motor.useMonitoring(Serial);
// configuring the monitoring to be well parsed by the webcontroller
motor.monitor_start_char = motor_id; // the same latter as the motor id in the commander
motor.monitor_end_char = motor_id; // the same latter as the motor id in the commander
command.verbose = VerboseMode::machine_readable; // can be set using the webcontroller - optional
...
}
void loop(){
....
....
// real-time monitoring calls
motor.monitor();
// real-time commander calls
command.run();
}