Supported motors



Arduino SimpleFOClibrary supports two types of BLDC motors:
- BLDC motors
- 3 phase (3 wire):
- Gimbal and High-performance BLDC motors
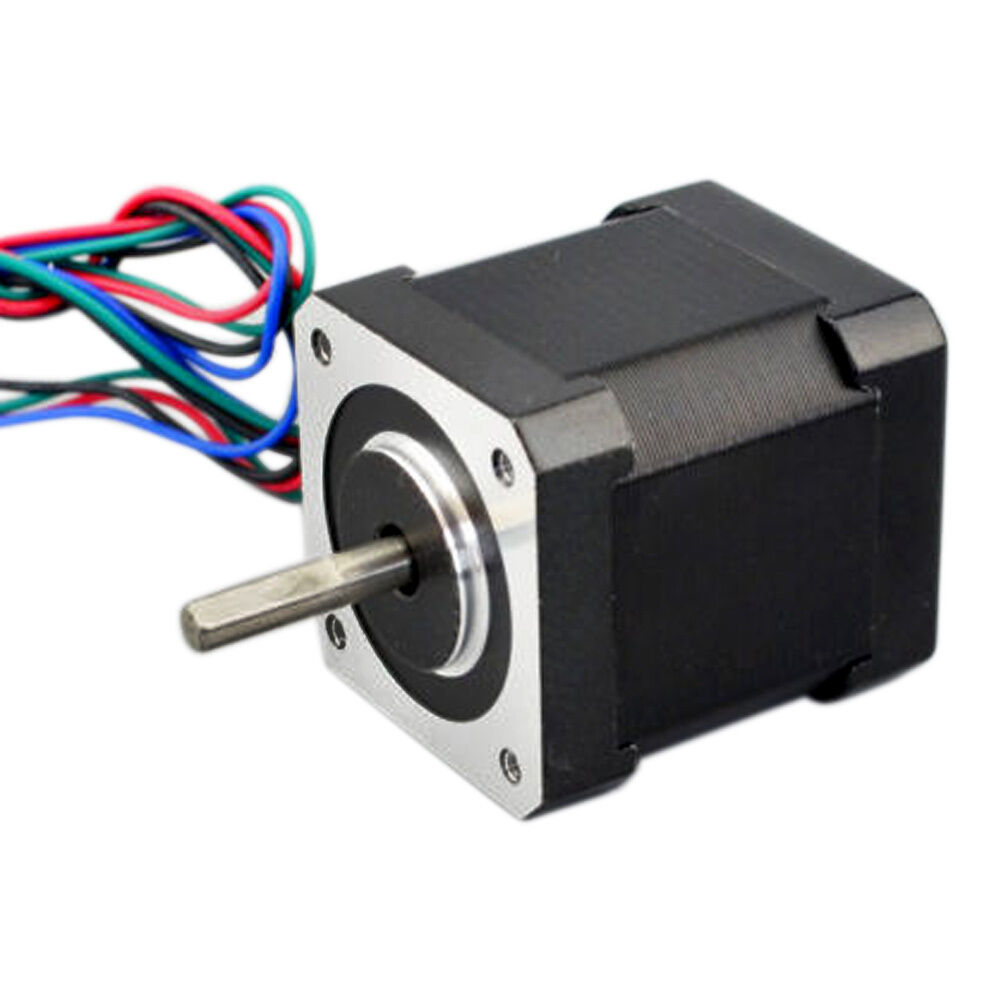
- Stepper motors
- 2 phase (4 wire)
📢 Critical: Read before powering up!
Before running any motor, you must ensure your hardware can handle the stall current. FOC can easily pull more current than a driver can handle if not limited in software.
The Worst-Case Calculation Check your motor’s phase resistance (\(R\)) and your power supply voltage (\(V_{DC}\)). The maximum possible current (\(I_{max}\)) is:
\[I_{max} = \frac{V_{DC}}{R}\]Safety Steps:
- Compare: If \(I_{max}\) exceeds your driver’s rating, you must limit the voltage in software.
- Software Limit: Use
driver.voltage_limitand (motor.voltage_limitand/ormotor.current_limit) to stay within safe bounds. - see motor docs - Power Supply: If you can, use a current-limited lab bench power supply for your initial tests.