Closed loop motion control
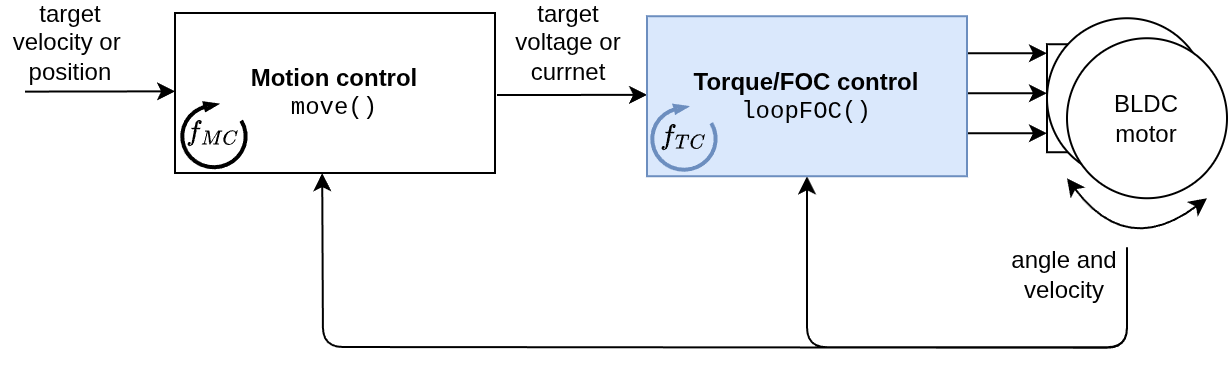
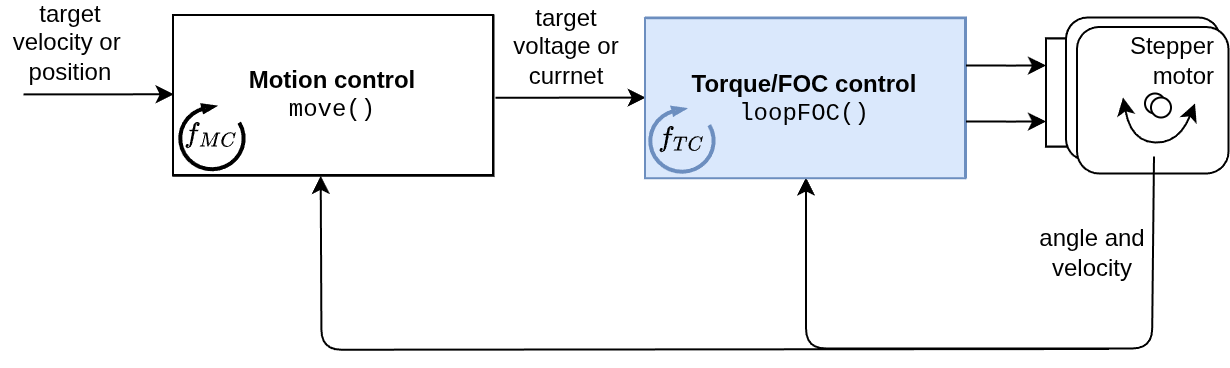
This is the standard motion control approach where the position sensor is used to provide feedback to the motion control loop. The motion control loop (motor.move()) will calculate the target torque (current or voltage) to be applied to the motor using the underlying torque/FOC control loop (motor.loopFOC()) in order to achieve the desired motion.
SimpleFOClibrary gives you the choice of using 3 different Closed-Loop control strategies:
// set FOC loop to be used
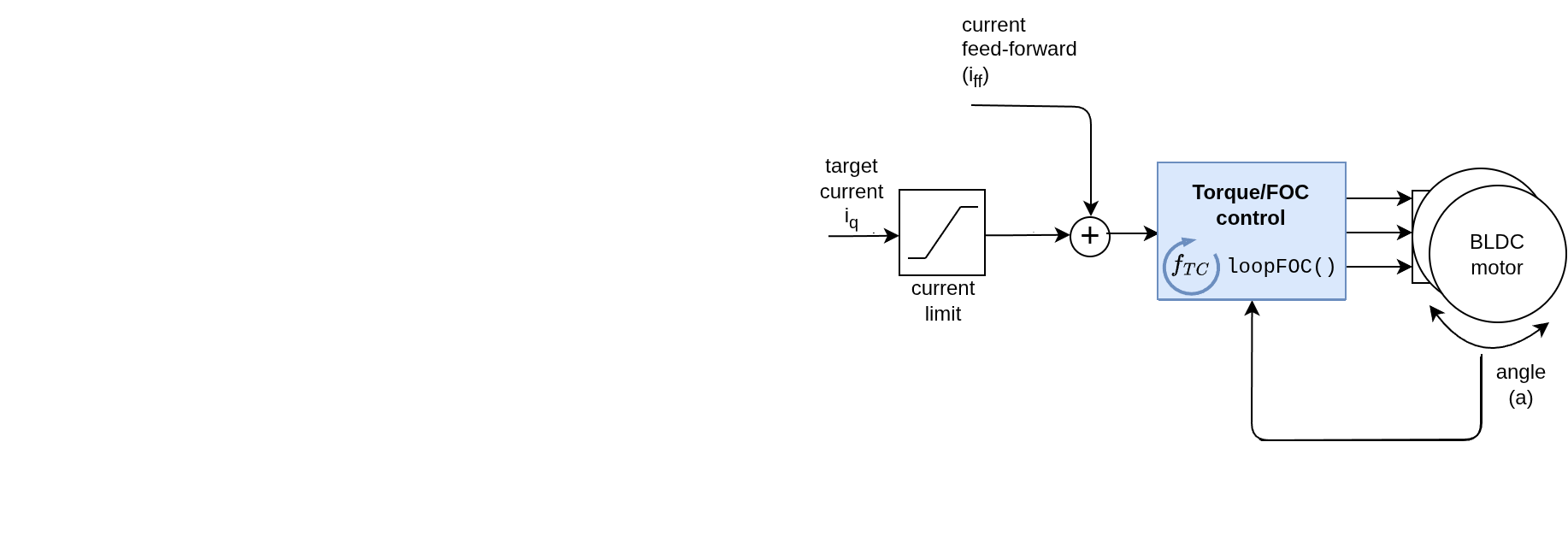
// MotionControlType::torque
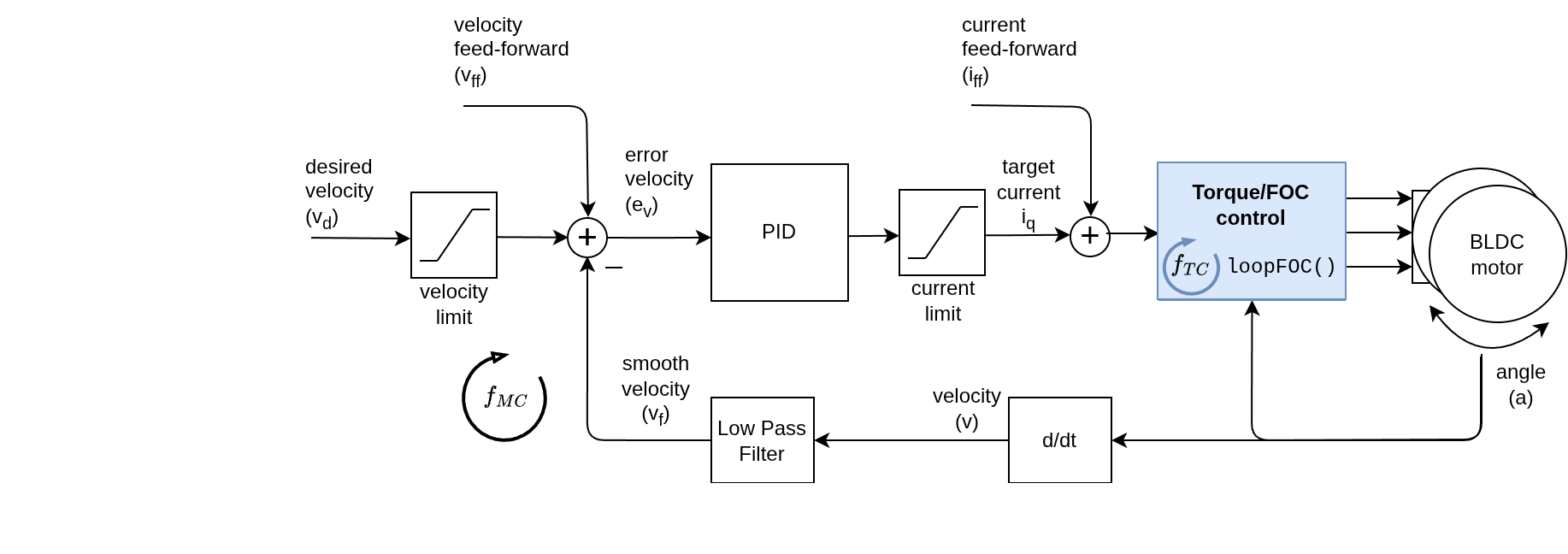
// MotionControlType::velocity
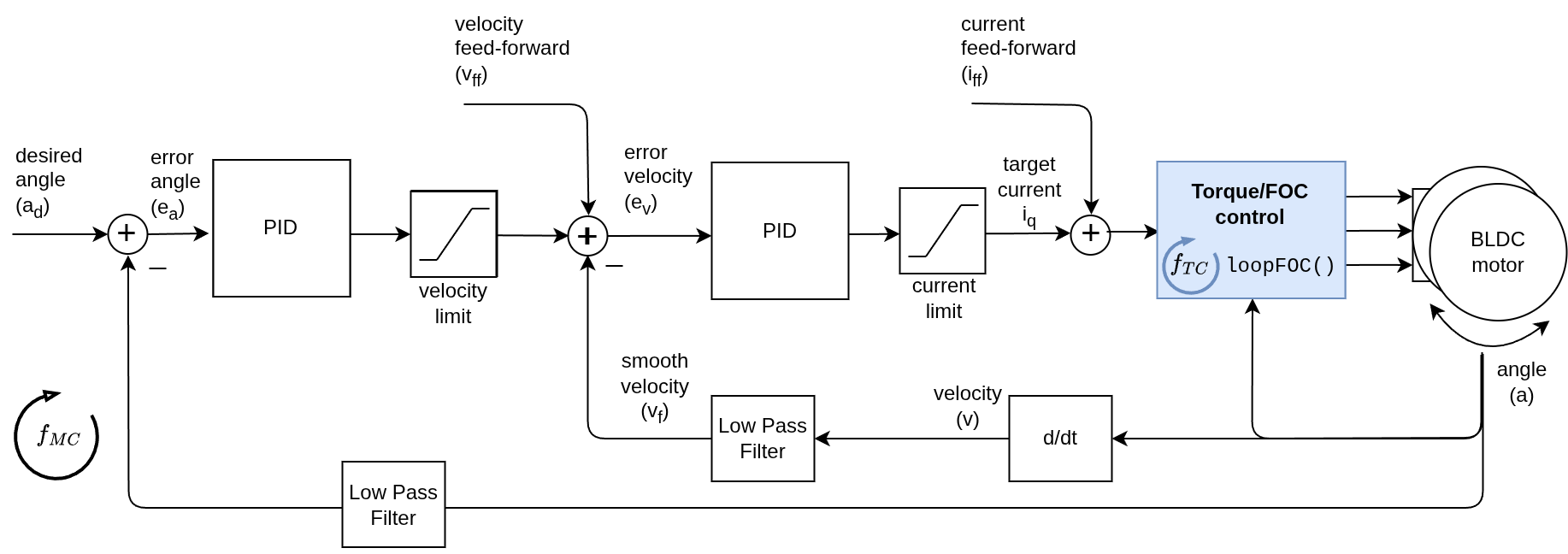
// MotionControlType::angle
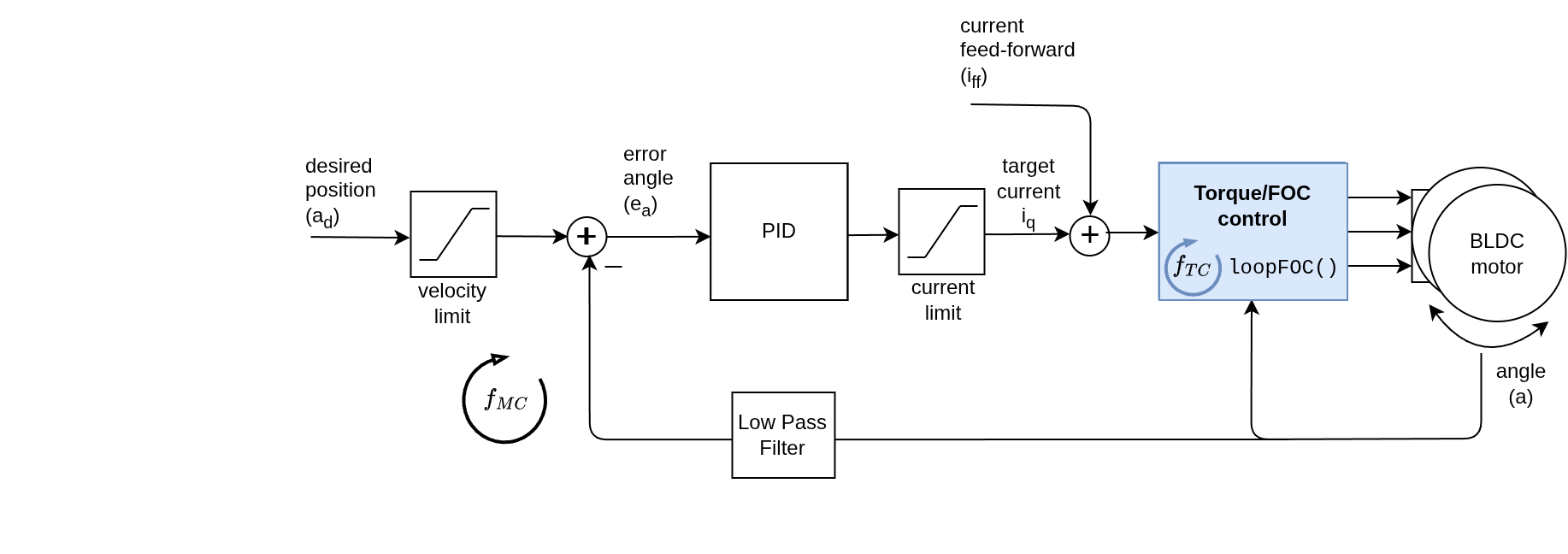
// MotionControlType::angle_nocascade
motor.controller = MotionControlType::angle;
| Torque control | Velocity control | Position/angle control |
|---|---|---|
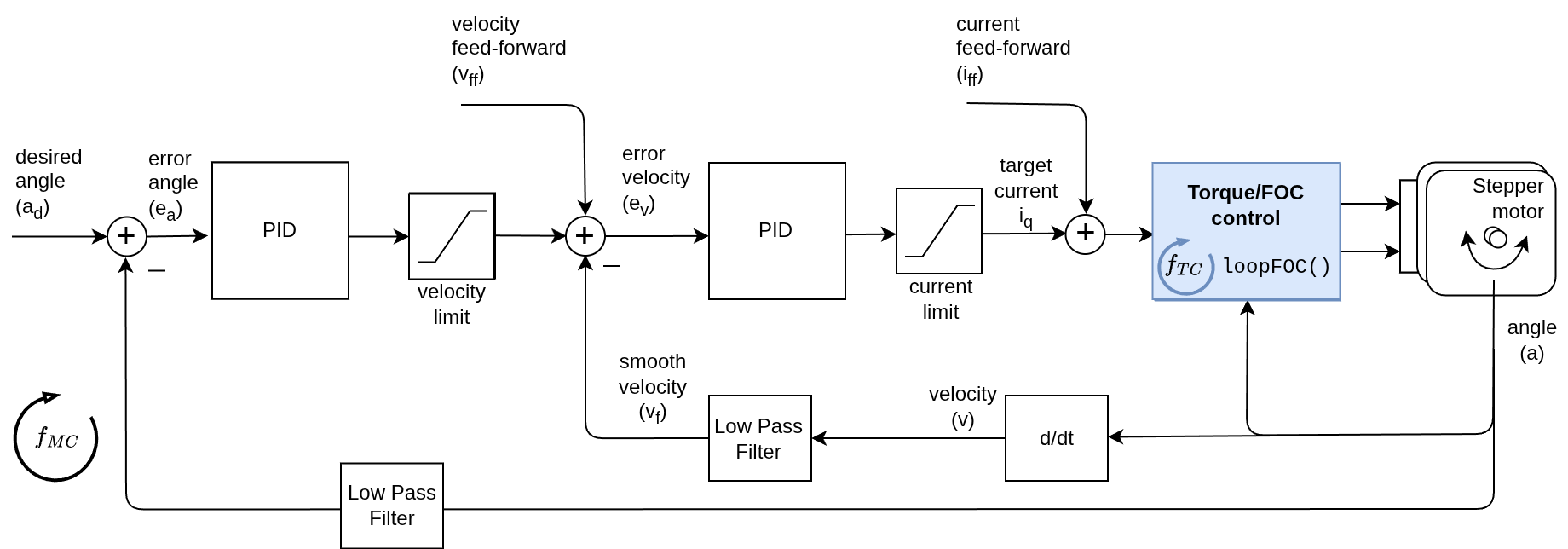
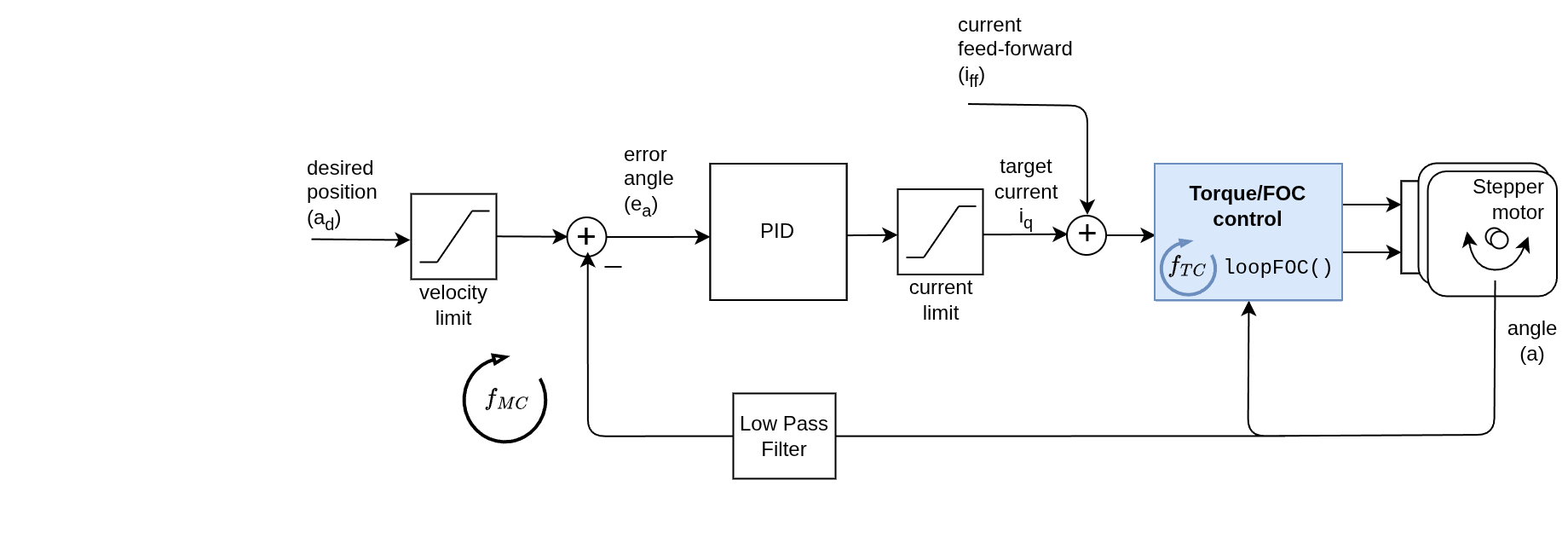
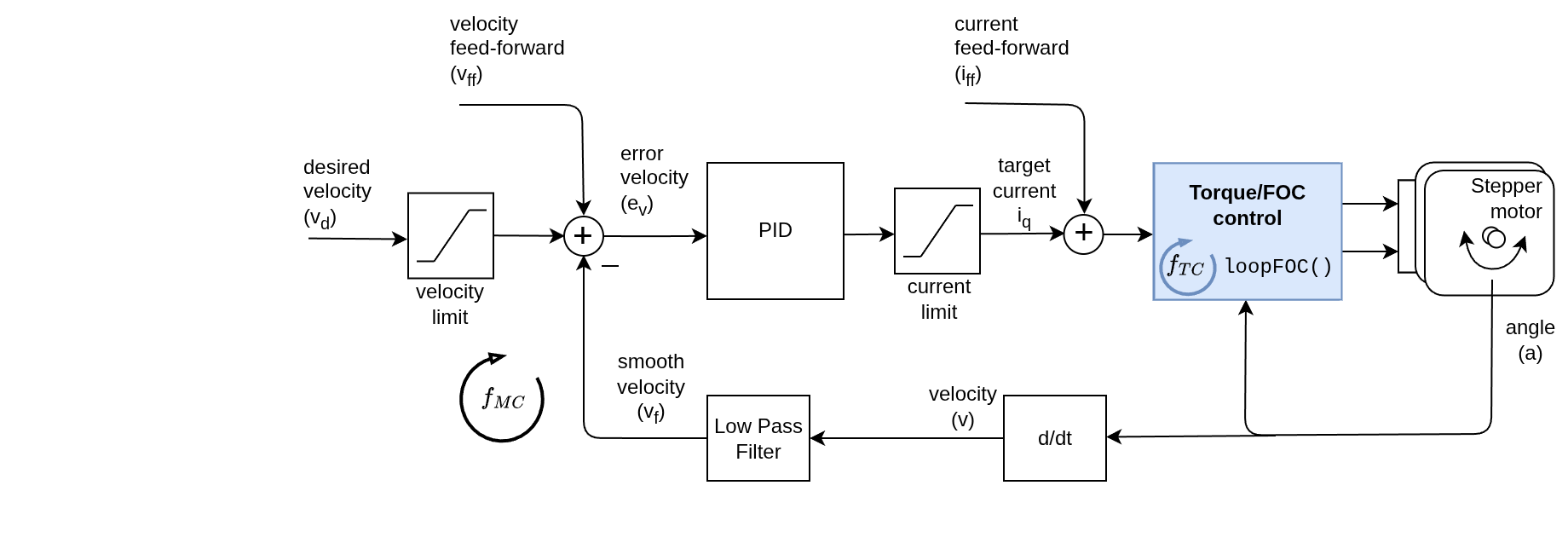
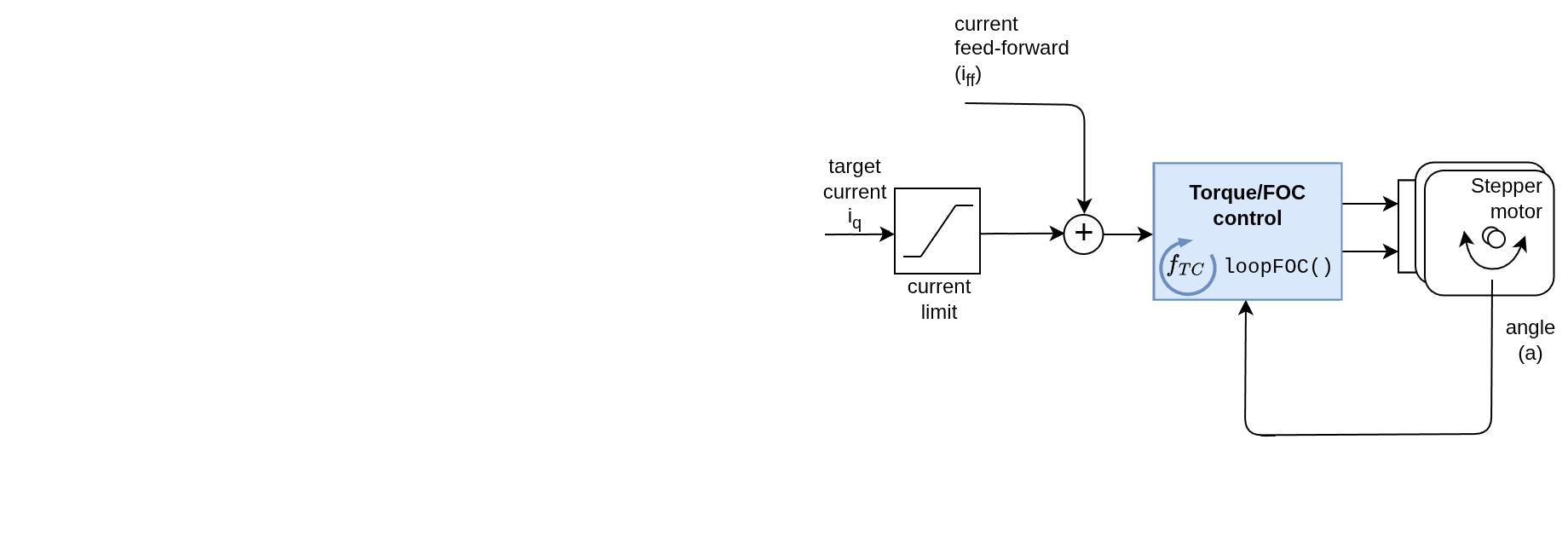
MotionControlType::torque | MotionControlType::velocity | MotionControlType::angle orMotionControlType::angle_nocascade |
| Go to Torque control docs | Go to Velocity control docs | Go to Position/angle control docs |
How it works?
Choose the motion control type:
Position control (Cascaded) Position control (Non-Cascaded) Velocity control Torque control