On this page
Motion control implementation v2.4+
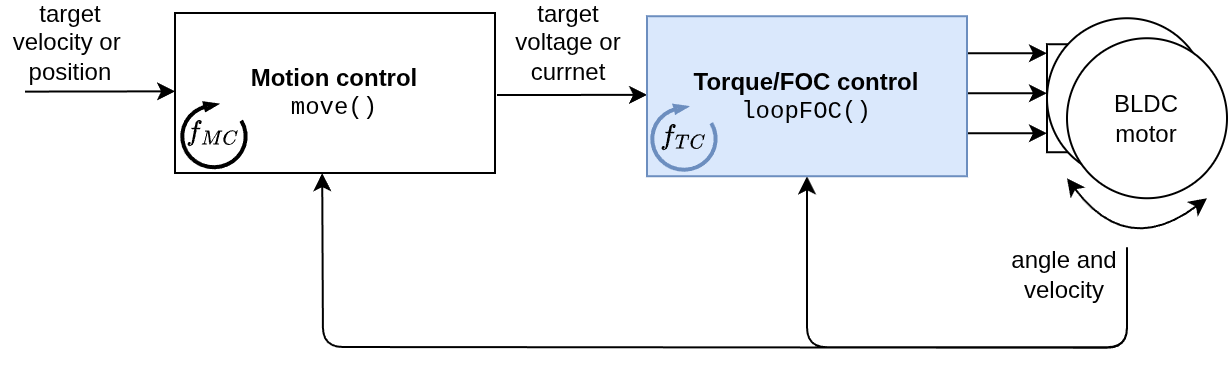
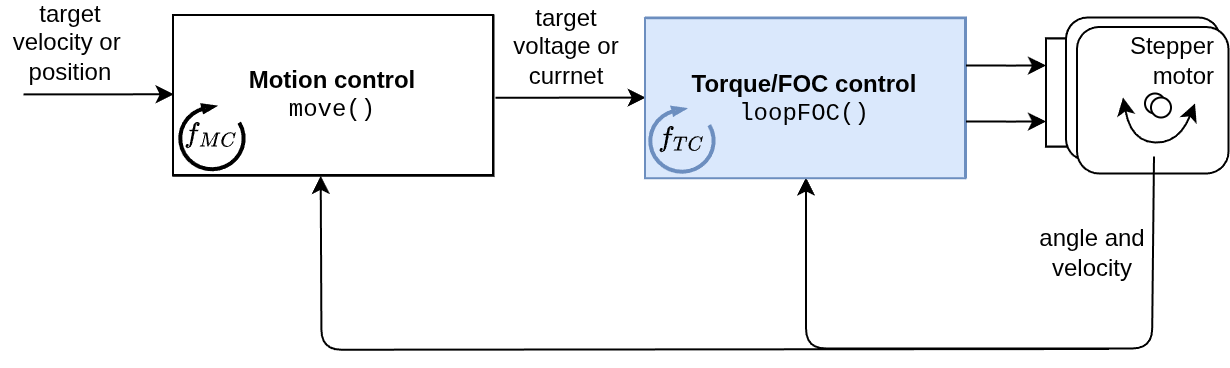
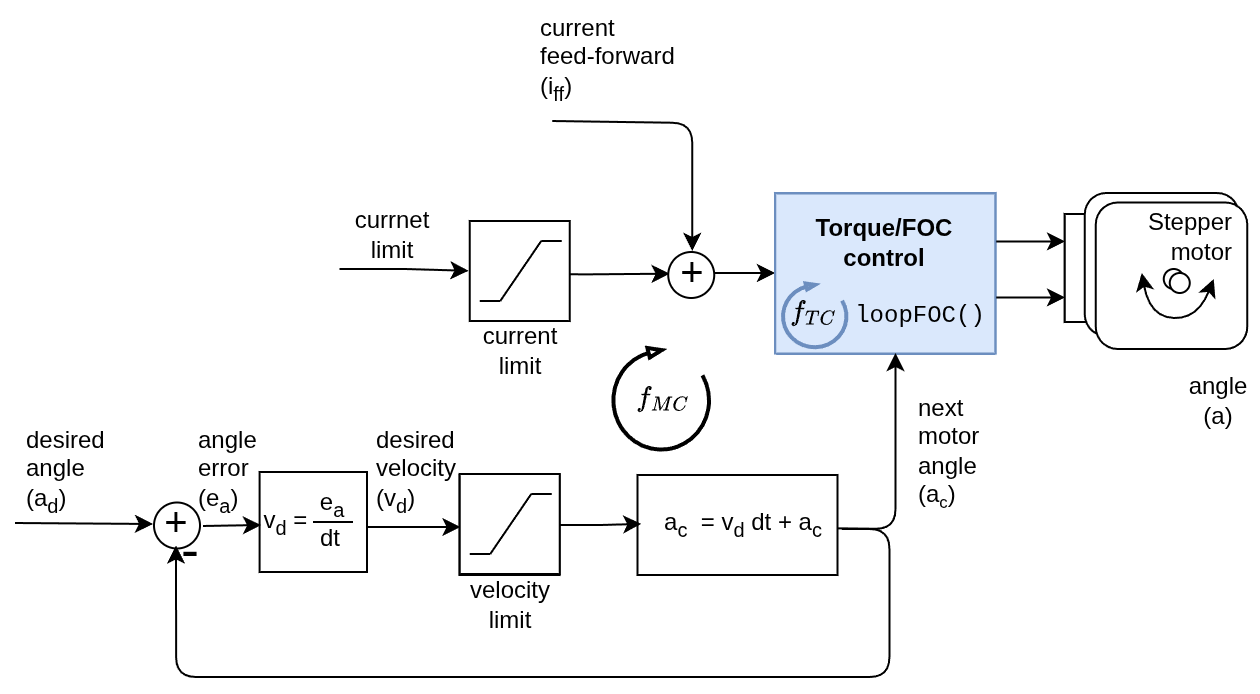
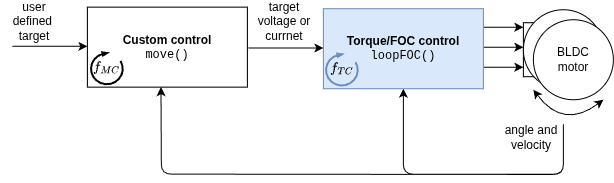
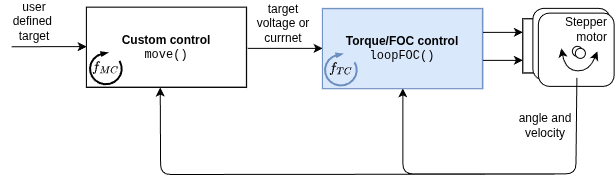
Motion control is the outer control loop in the SimpleFOClibrary, executed within move(). It converts user commands (position, velocity, or torque targets) into a current setpoint (current_sp) that is passed to the torque control layer in loopFOC().
The library implements 7 motion control strategies:
enum MotionControlType : uint8_t {
torque = 0x00, // Direct torque/current control
velocity = 0x01, // Velocity motion control
angle = 0x02, // Position control (cascade)
velocity_openloop = 0x03, // Open-loop velocity
angle_openloop = 0x04, // Open-loop position
angle_nocascade = 0x05, // Position control (direct)
custom = 0x06 // User-defined control
};
Selection:
motor.controller = MotionControlType::velocity; // Can be changed in real-time
The move() function
Motion control is executed in the move() function, which should be called iteratively in the main loop. The function accepts an optional target parameter; if omitted, it uses motor.target.
void loop() {
motor.loopFOC(); // Fast: torque control
motor.move(); // Slower: motion control
// or
motor.move(new_target); // Override motor.target
}
The real-time motion control is executed inside the move() function. This function executes one of the control loops based on the controller variable. The parameter new_target is the target value to be set for the control loop. The new_target value is optional; if not set, the motion control will use the motor.target variable.
Here is a simplified view of the implementation:
// Iterative function running outer loop of the FOC algorithm
// Behavior of this function is determined by the motor.controller variable
// - needs to be called iteratively, it is an asynchronous function
// - if target is not set it uses motor.target value
void FOCMotor::move(float new_target) {
// set internal target variable
if(_isset(new_target)) target = new_target;
// downsampling (optional)
if(motion_cnt++ < motion_downsample) return;
motion_cnt = 0;
// read sensor values (except for open loop modes)
if(controller != MotionControlType::angle_openloop &&
controller != MotionControlType::velocity_openloop) {
shaft_angle = shaftAngle();
shaft_velocity = shaftVelocity();
}
// if disabled or not ready, do nothing
if(!enabled || motor_status != FOCMotorStatus::motor_ready) return;
// choose control loop
switch (controller) {
case MotionControlType::torque:
current_sp = target;
break;
case MotionControlType::angle_nocascade:
// angle set point
shaft_angle_sp = target;
// calculate the torque command directly from position error
current_sp = P_angle(shaft_angle_sp - LPF_angle(shaft_angle));
break;
case MotionControlType::angle:
// angle set point
shaft_angle_sp = target;
// calculate velocity set point
shaft_velocity_sp = feed_forward_velocity + P_angle(shaft_angle_sp - LPF_angle(shaft_angle));
shaft_velocity_sp = _constrain(shaft_velocity_sp, -velocity_limit, velocity_limit);
// calculate the torque command
current_sp = PID_velocity(shaft_velocity_sp - shaft_velocity);
break;
case MotionControlType::velocity:
// velocity set point
shaft_velocity_sp = target;
// calculate the torque command
current_sp = PID_velocity(shaft_velocity_sp - shaft_velocity);
break;
case MotionControlType::velocity_openloop:
shaft_velocity_sp = target;
current_sp = velocityOpenloop(shaft_velocity_sp);
break;
case MotionControlType::angle_openloop:
shaft_angle_sp = target;
current_sp = angleOpenloop(shaft_angle_sp);
break;
case MotionControlType::custom:
// custom control - user provides the callback function
if(customMotionControlCallback)
current_sp = customMotionControlCallback(this, target);
break;
}
}
The move() function is typically called at the same frequency as loopFOC(), but it can be downsampled using the motion_downsample variable to reduce computational load. This can allow for more complex motion control algorithms that do not need to run at the full speed of the torque control loop.
Torque Mode
Type: MotionControlType::torque
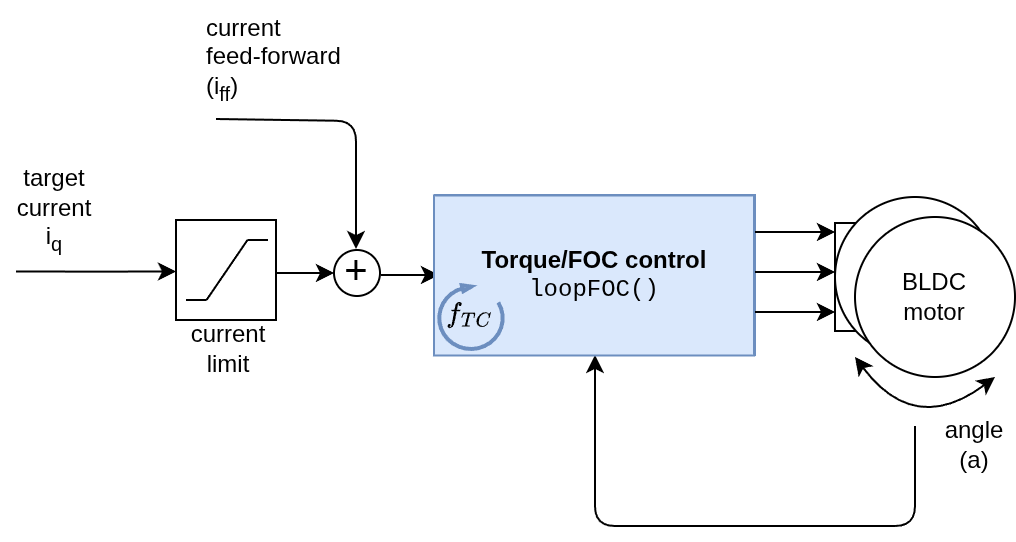
Direct torque/current control - the target value is passed directly as the current setpoint to the torque controller.
case MotionControlType::torque:
current_sp = target;
break;
The actual torque control strategy (voltage, DC current, FOC current, estimated current) is determined by motor.torque_controller.
Detailed implementation
For detailed information about torque control modes, see the torque control implementation page.
Torque control API documentation
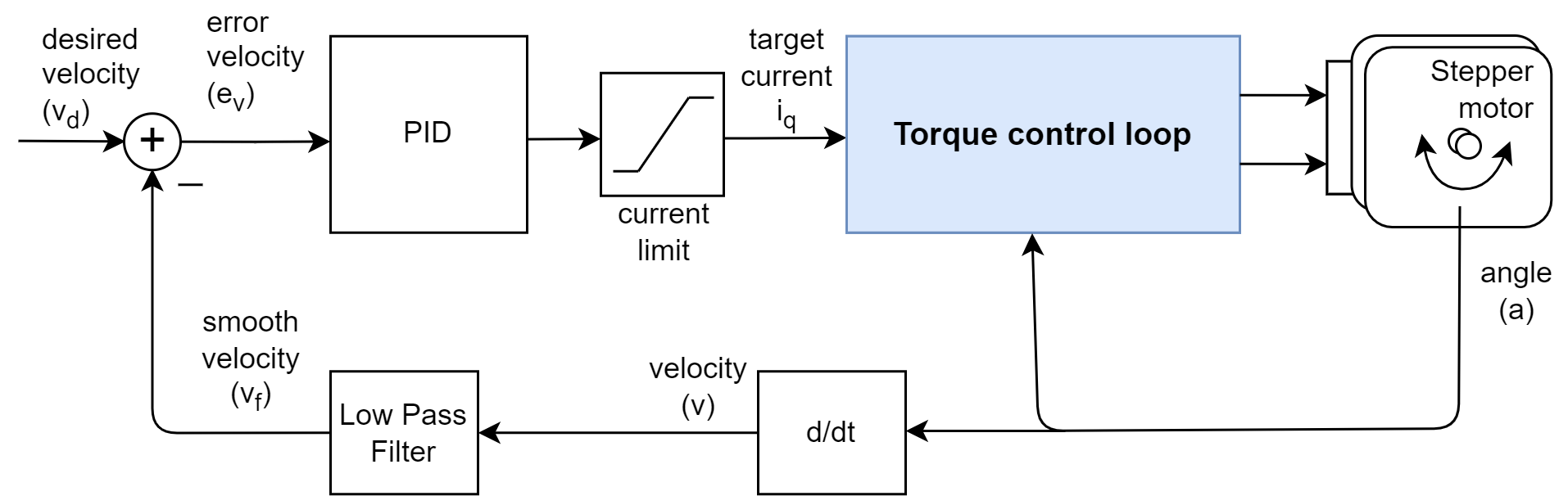
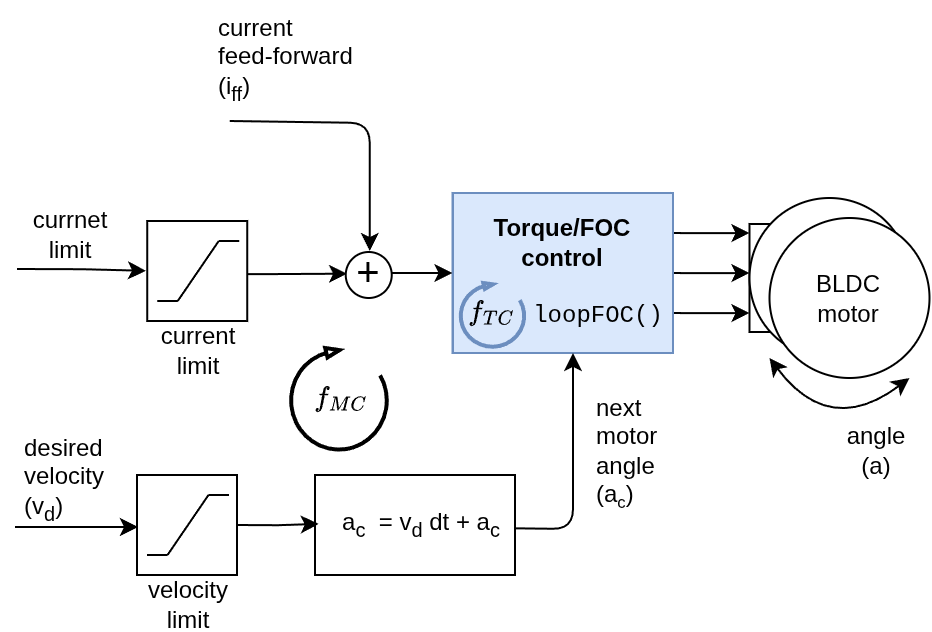
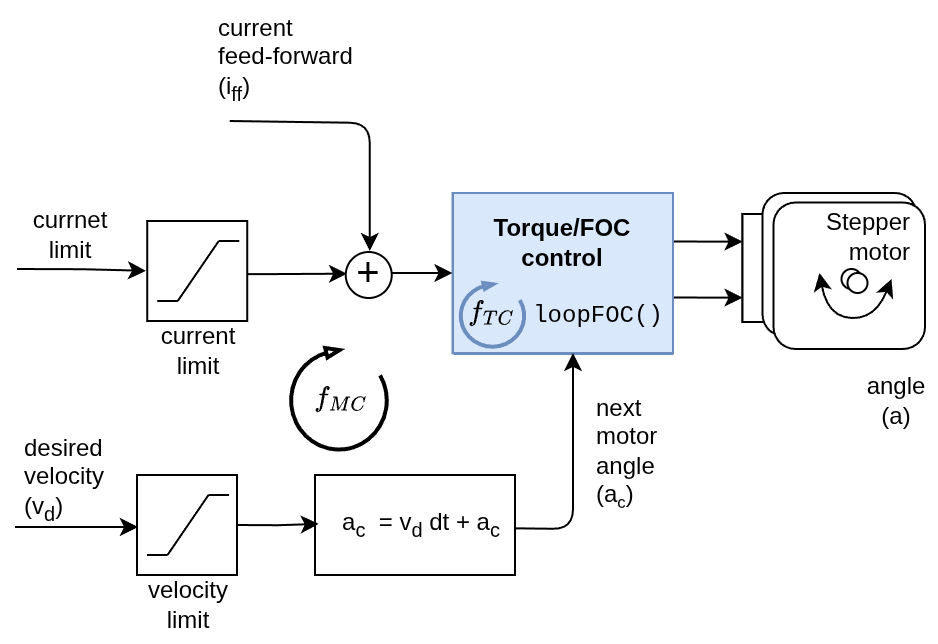
Velocity Control
Type: MotionControlType::velocity
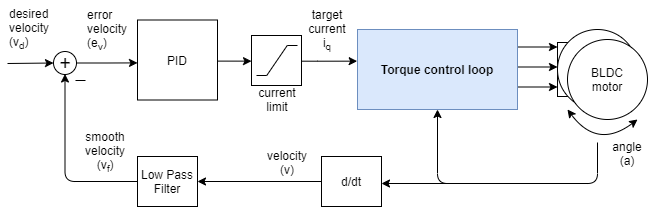
Closed-loop velocity control using a PID controller to calculate the current setpoint from velocity error.
Control Flow
case MotionControlType::velocity:
shaft_velocity_sp = target;
current_sp = PID_velocity(shaft_velocity_sp - shaft_velocity);
break;
Velocity Controller
The PID_velocity controller is a PIDController object. Also note the low-pass filtering of the velocity measurement before calculating the error.
motor.PID_velocity.P = 0.2;
motor.PID_velocity.I = 20.0;
motor.PID_velocity.D = 0.0;
motor.LPF_velocity.Tf = 0.01; // 10ms low-pass filter time constant
Velocity control API documentation PID controller implementation
Additional Features
Velocity low-pass filtering:
motor.LPF_velocity.Tf = 0.01; // 10ms low-pass filter time constant
Low-pass filter implementation
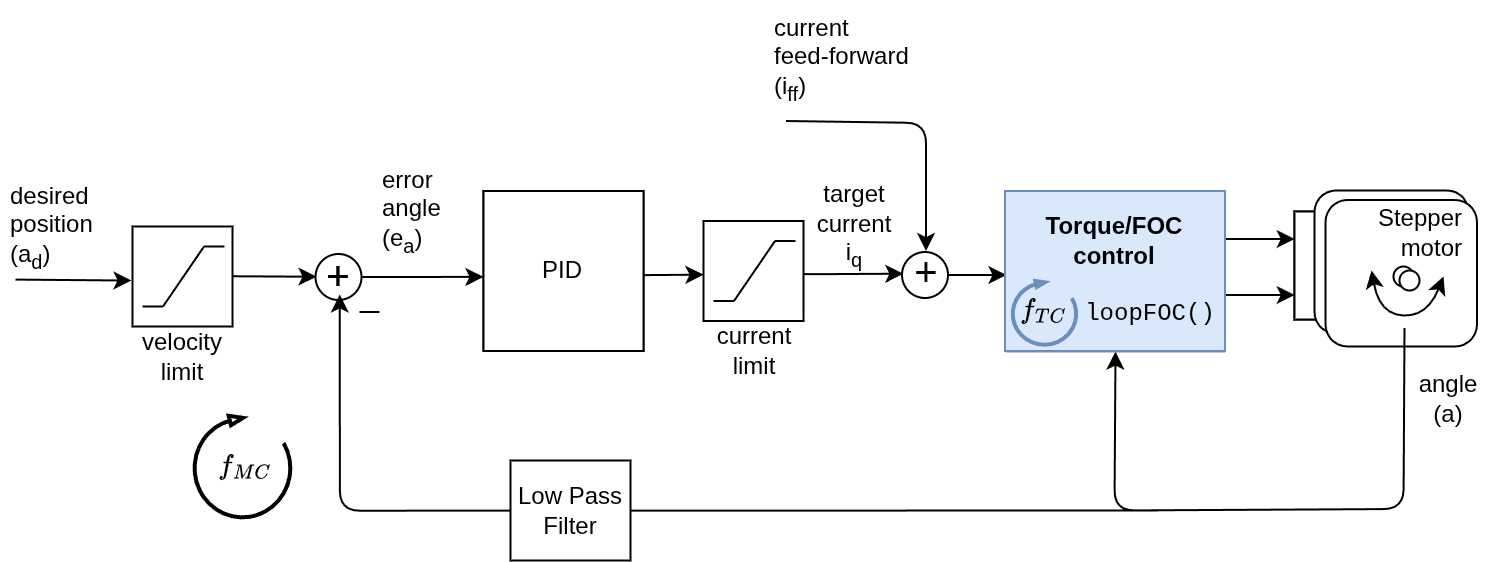
Position Control (Cascade Mode)
Type: MotionControlType::angle
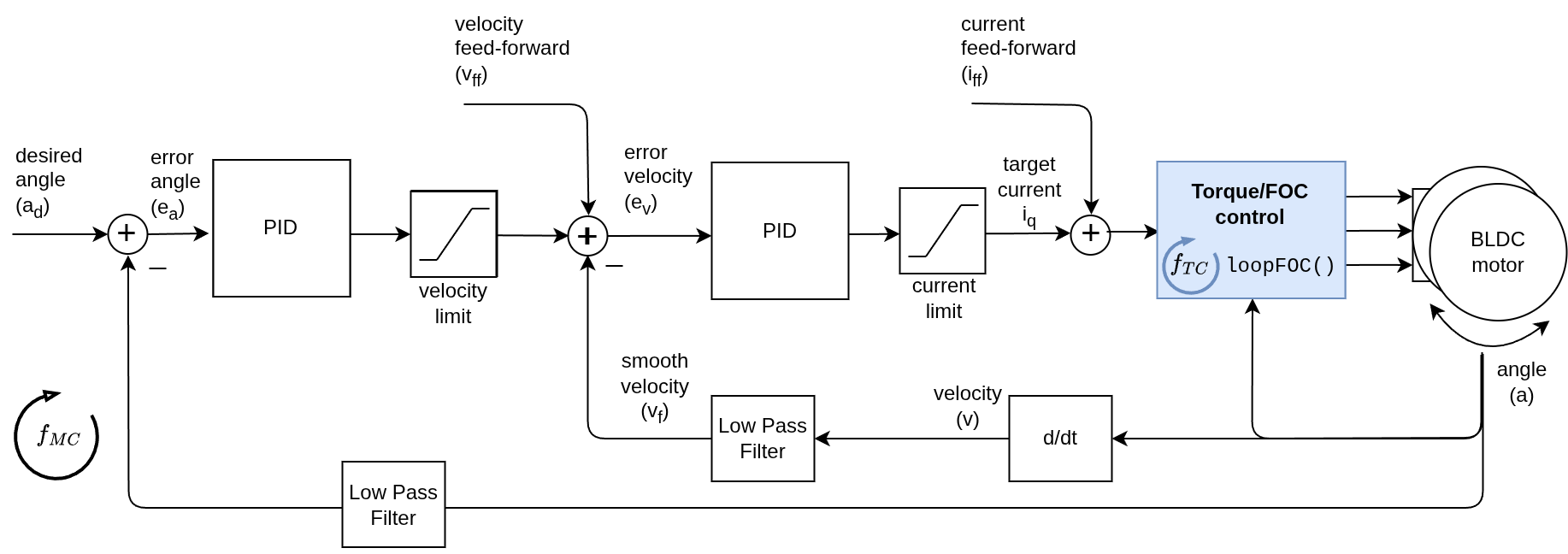
Cascaded position control: P controller generates velocity setpoint, then velocity PID calculates current setpoint.
Control Flow
case MotionControlType::angle:
shaft_angle_sp = target;
// P controller calculates velocity setpoint
shaft_velocity_sp = feed_forward_velocity +
P_angle(shaft_angle_sp - LPF_angle(shaft_angle));
// Constrain velocity
shaft_velocity_sp = _constrain(shaft_velocity_sp, -velocity_limit, velocity_limit);
// Velocity PID calculates current setpoint
current_sp = PID_velocity(shaft_velocity_sp - shaft_velocity);
break;
Position Controller
The P_angle controller is a PIDController object (though typically only P gain is used):
motor.P_angle.P = 20.0; // Proportional gain
motor.P_angle.I = 0.0; // Usually zero
motor.P_angle.D = 0.0; // Usually zero
Angle control API documentation PID controller implementation
Additional Features
Angle low-pass filtering:
motor.LPF_angle.Tf = 0.0; // Usually disabled (0)
Low-pass filter implementation
Feed-forward velocity:
motor.feed_forward_velocity = 0.5; // [rad/s]
Velocity limiting:
motor.velocity_limit = 10.0; // [rad/s]
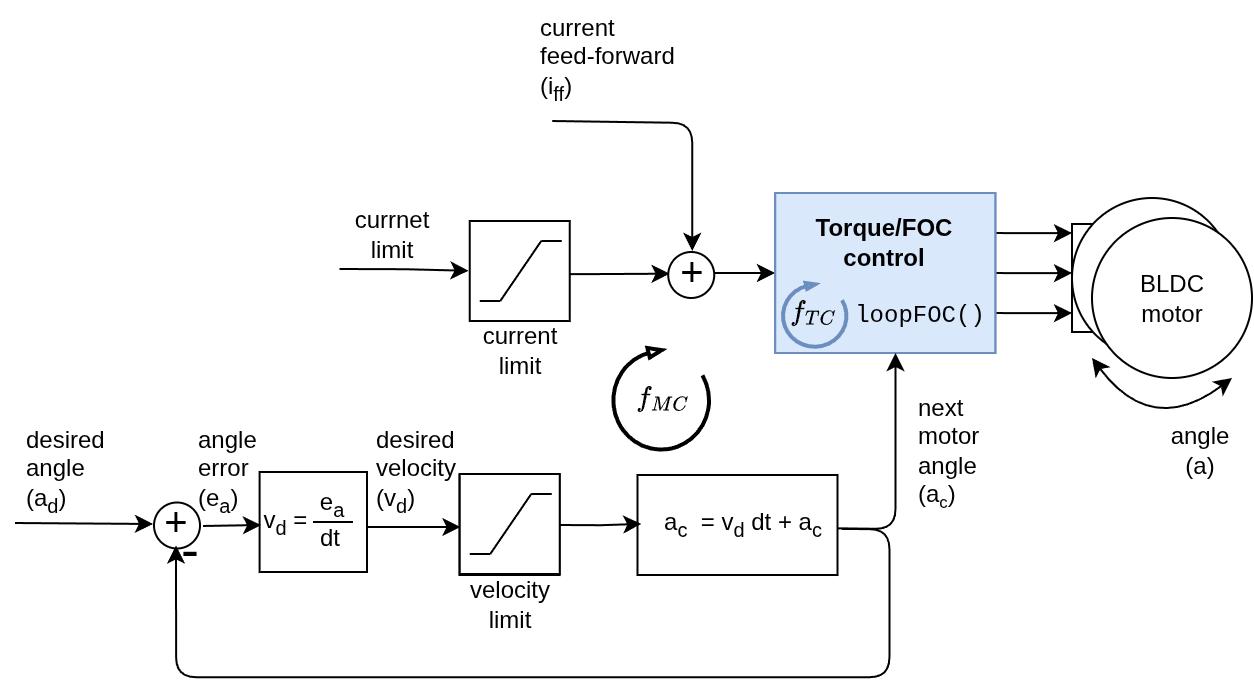
Position Control (Non-Cascade Mode)
Type: MotionControlType::angle_nocascade
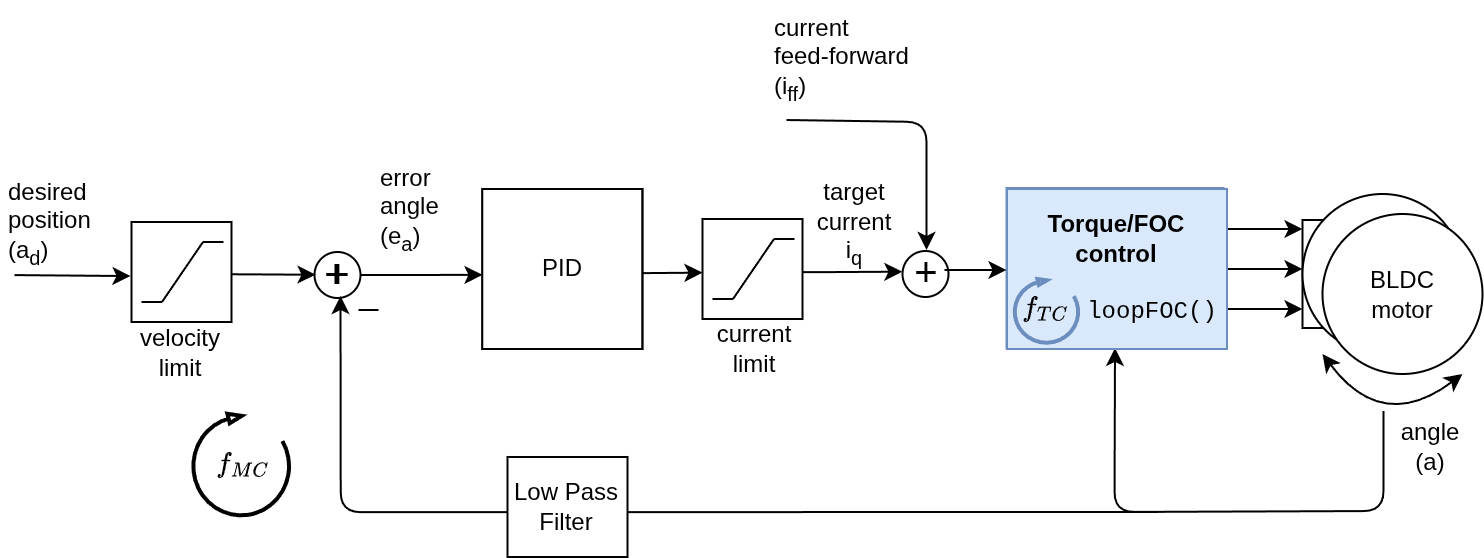
Direct position-to-torque control without velocity loop intermediary - P controller directly calculates current setpoint.
Control Flow
case MotionControlType::angle_nocascade:
shaft_angle_sp = target;
current_sp = P_angle(shaft_angle_sp - LPF_angle(shaft_angle));
break;
Position Controller
The P_angle controller is a PIDController object (though typically only P gain is used):
motor.P_angle.P = 20.0; // Proportional gain
motor.P_angle.I = 0.0; // Usually very low or zero
motor.P_angle.D = 0.0; // Usually zero
Non-cascade angle control API documentation PID controller implementation
Additional Features
Angle low-pass filtering:
motor.LPF_angle.Tf = 0.0; // Usually disabled (0)
Low-pass filter implementation
Open-Loop Velocity Control
Type: MotionControlType::velocity_openloop
Open-loop velocity control without sensor feedback - generates rotating field at target velocity.
Control Flow
case MotionControlType::velocity_openloop:
shaft_velocity_sp = target;
current_sp = velocityOpenloop(shaft_velocity_sp);
break;
The velocityOpenloop() function integrates velocity to calculate angle:
float FOCMotor::velocityOpenloop(float target_velocity) {
unsigned long now_us = _micros();
float Ts = (now_us - open_loop_timestamp) * 1e-6f;
if(Ts <= 0 || Ts > 0.5f) Ts = 1e-3f;
shaft_angle = _normalizeAngle(shaft_angle + target_velocity * Ts);
shaft_velocity = target_velocity;
open_loop_timestamp = now_us;
return current_sp;
}
Open-loop velocity control API documentation
Open-Loop Position Control
Type: MotionControlType::angle_openloop
Open-loop position control - sets electrical angle directly without sensor feedback.
Control Flow
case MotionControlType::angle_openloop:
shaft_angle_sp = target;
current_sp = angleOpenloop(shaft_angle_sp);
break;
The angleOpenloop() function sets the angle and applies velocity ramping:
float FOCMotor::angleOpenloop(float target_angle) {
unsigned long now_us = _micros();
float Ts = (now_us - open_loop_timestamp) * 1e-6f;
if(Ts <= 0 || Ts > 0.5f) Ts = 1e-3f;
// Calculate angle difference
float angle_diff = _normalizeAngle(target_angle - shaft_angle);
// Apply velocity limit
if(abs(angle_diff) > velocity_limit * Ts) {
angle_diff = _sign(angle_diff) * velocity_limit * Ts;
}
shaft_angle = _normalizeAngle(shaft_angle + angle_diff);
open_loop_timestamp = now_us;
return current_sp;
}
Open-loop position control API documentation
Custom Control
Type: MotionControlType::custom
User-defined control algorithm via callback function.
Control Flow
case MotionControlType::custom:
if(customMotionControlCallback)
current_sp = customMotionControlCallback(this, target);
break;
Usage
Set the callback function pointer:
// Define custom control function
float myCustomControl(FOCMotor* motor, float target) {
// Your control algorithm here
// Access motor state: motor->shaft_velocity, motor->shaft_angle, etc.
// Return current setpoint
return calculated_current_sp;
}
// Register callback
motor.customMotionControlCallback = myCustomControl;
motor.controller = MotionControlType::custom;
Custom control API documentation