On this page
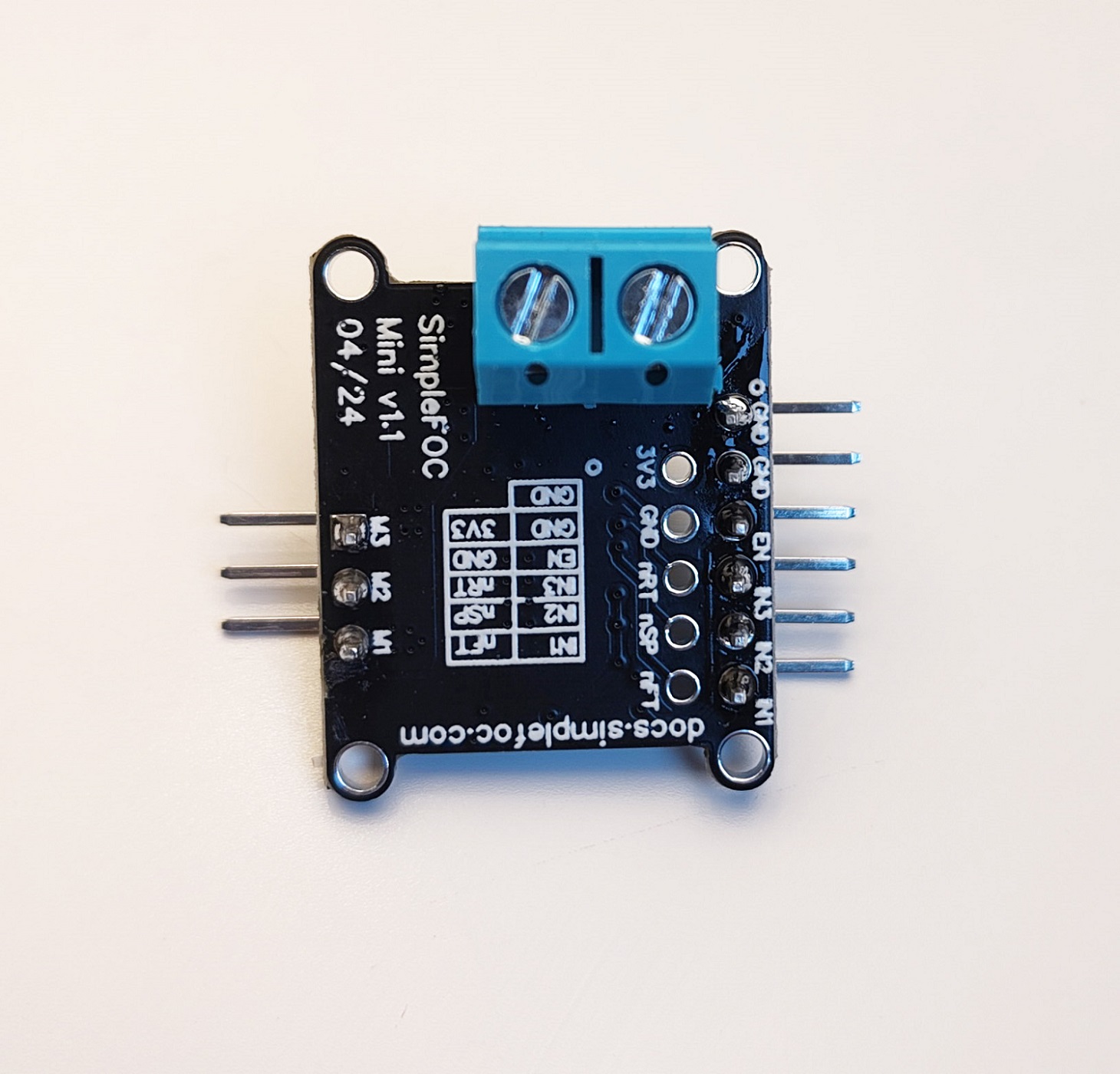
SimpleFOCMini v1.1
![]()


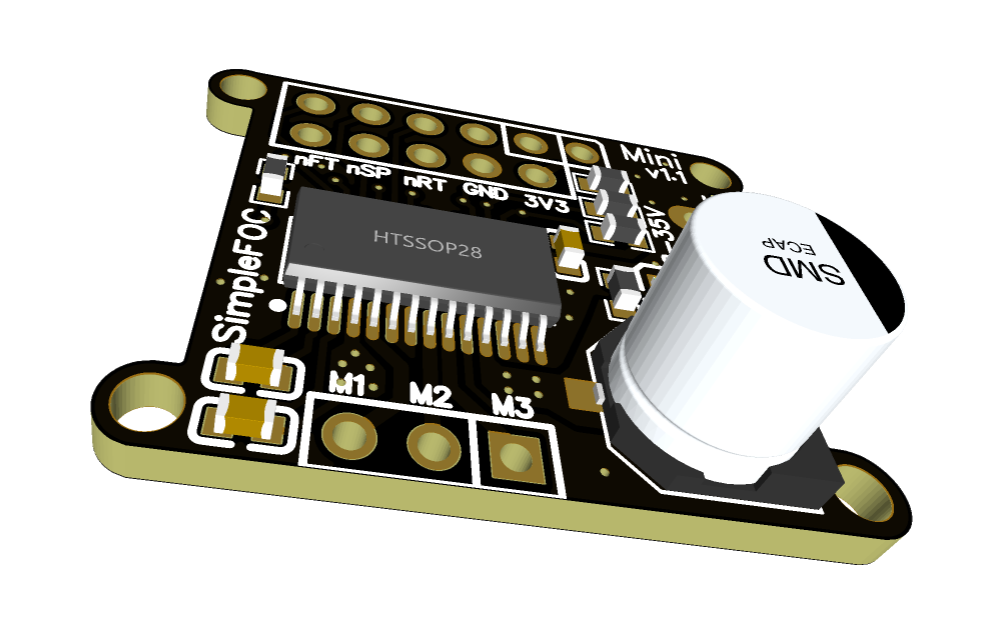
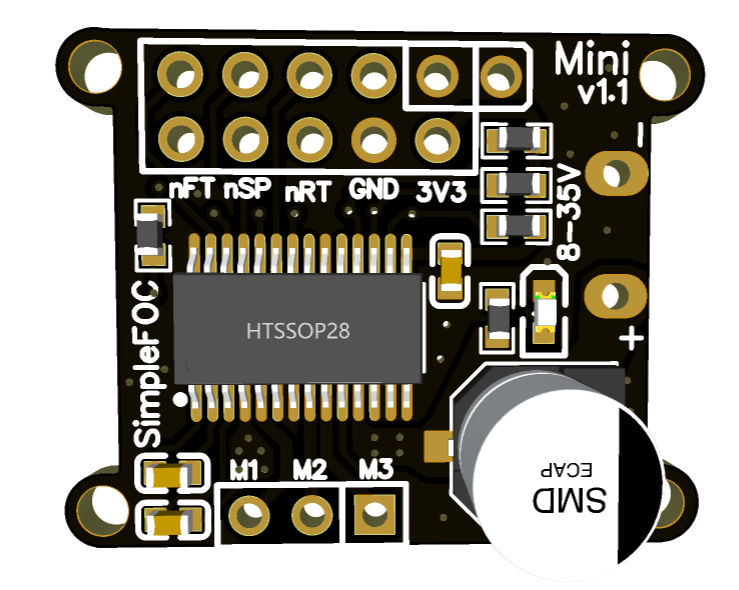
SimpleFOCMini is a small-package, low-cost, modular and user-friendly driver for running gimbal BLDC motors with FOC algorithm. As for the SimpleFOCShields, the main motivation of this board is to make using low-power BLDC motors in hobby applications more accessible. The main goals of this board however are:
- Produce a small package BLDC driver that still has all the features of the SimpleFOCShield v1
- Make it in away to be a minimal working example for users that are interested to build their own boards based on the DRV8313 chip.
- Make it as cheap as possible.
- Use only long-term (as of mid 2022) available components.
- Finally, the goal of this board is to provide a modular and simple setup for controlling gimbal motors (up to 3Amps) using FOC control and enable fast prototyping and full exploitation of their capabilities.
This board in combination with the SimpleFOClibrary will give you a simple and intuitive way to control the BLDC motors’ current, torque, velocity and position. And this board can be used as a drop in replacement for the SimpleFOCShield v1.

Features
- Plug & play: In combination with Arduino SimpleFOClibrary
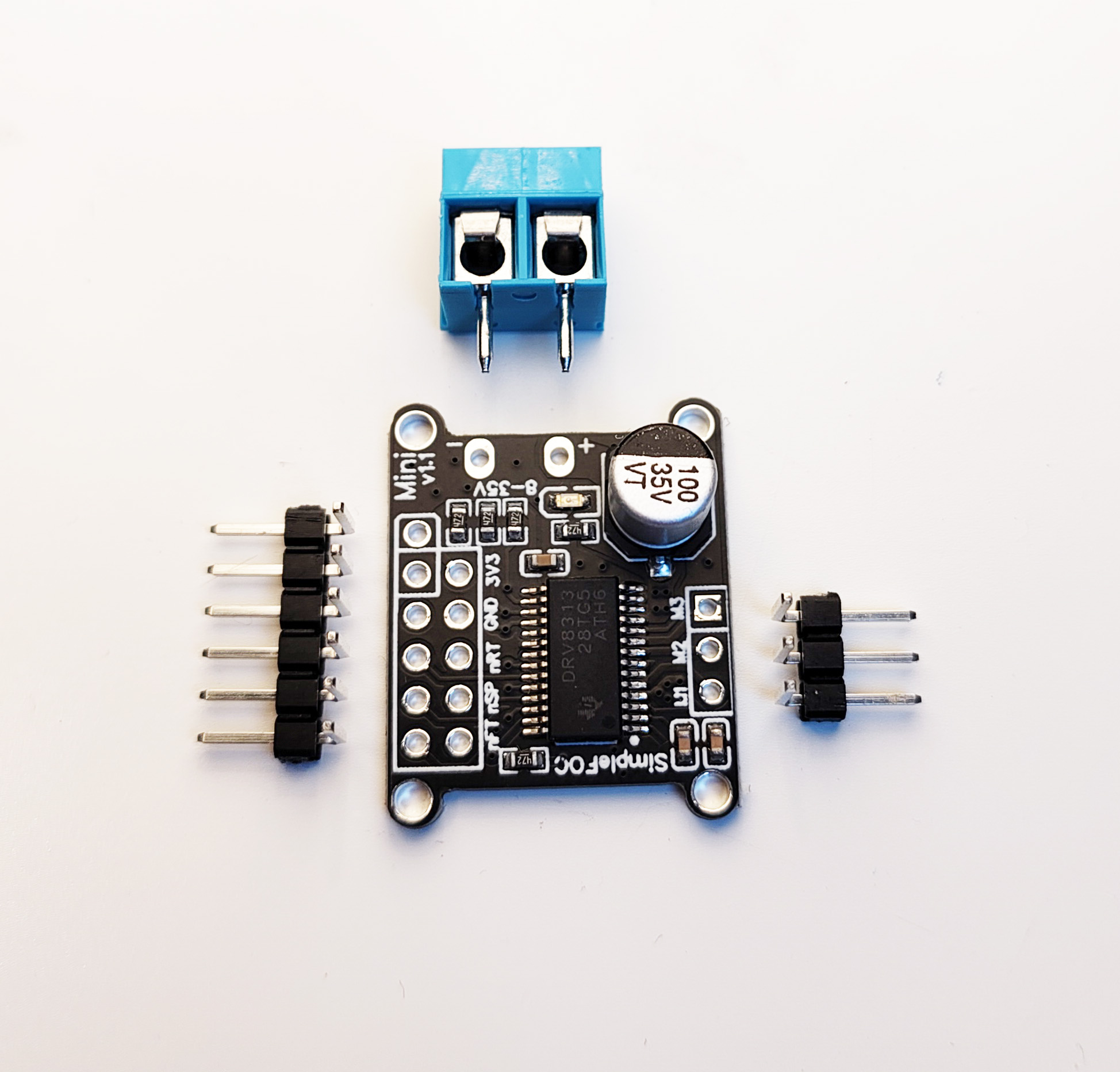
- DRV8313 based - datasheet
- Power supply: 8-35V
- Max current: 2.5A per phase
- Onboard 3.3V LDO
- Small size: 26x21 mm
- Fully open-source:
- Low-cost:
- JLCPCB production cost ~3-5€
- Will be available in the shop soon: 7-10€
BEWARE
This BLDC driver board is primarily designed for gimbal motors with the internal resistance of R >10 Ω. Please make sure that your motor fits in this category before deciding to use the SimpleFOCMini.


Release log
| Release | Date | Description |
|---|---|---|
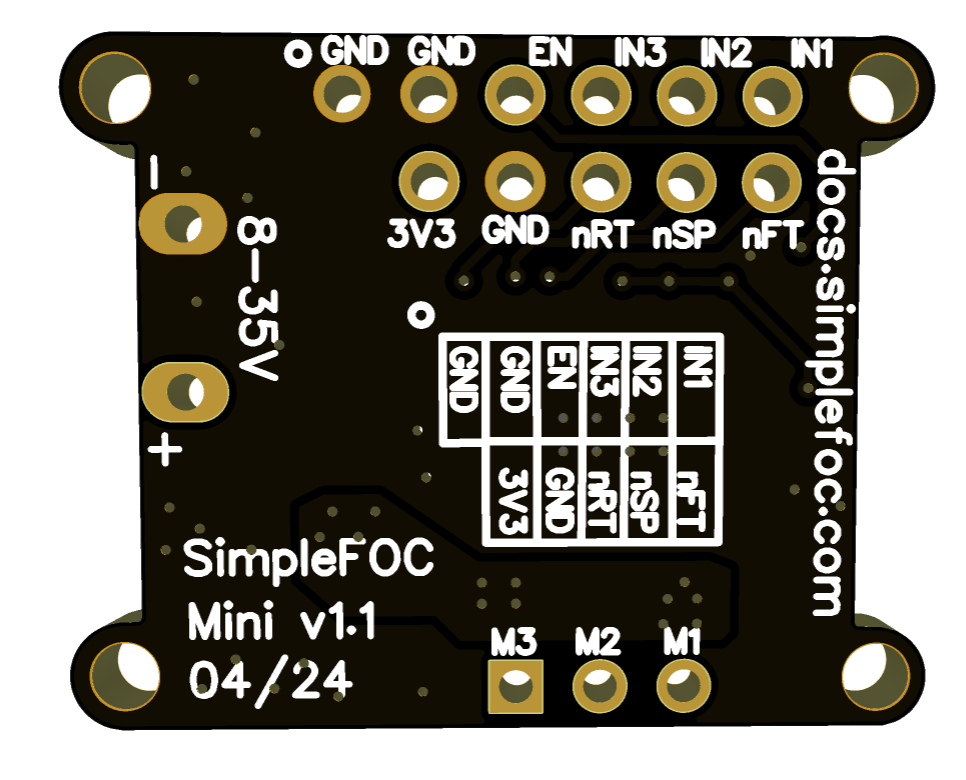
| v1.1 | 2024-04 | A quick iteration with a few changes: 1. Aligned motor output header with the input header so that it can be stacked in the protoboard 2. Input header updated to be easier to use with arduino UNO, nucleos, but also with qtpy… - Changed the order of the IN1,IN2,IN3 and EN: - Added an additional GND pin |
| v1.0 | 2022-04 | Initial release |
Connection schematic
An electrical connection example of a BLDC motor with an encoder as position sensor.
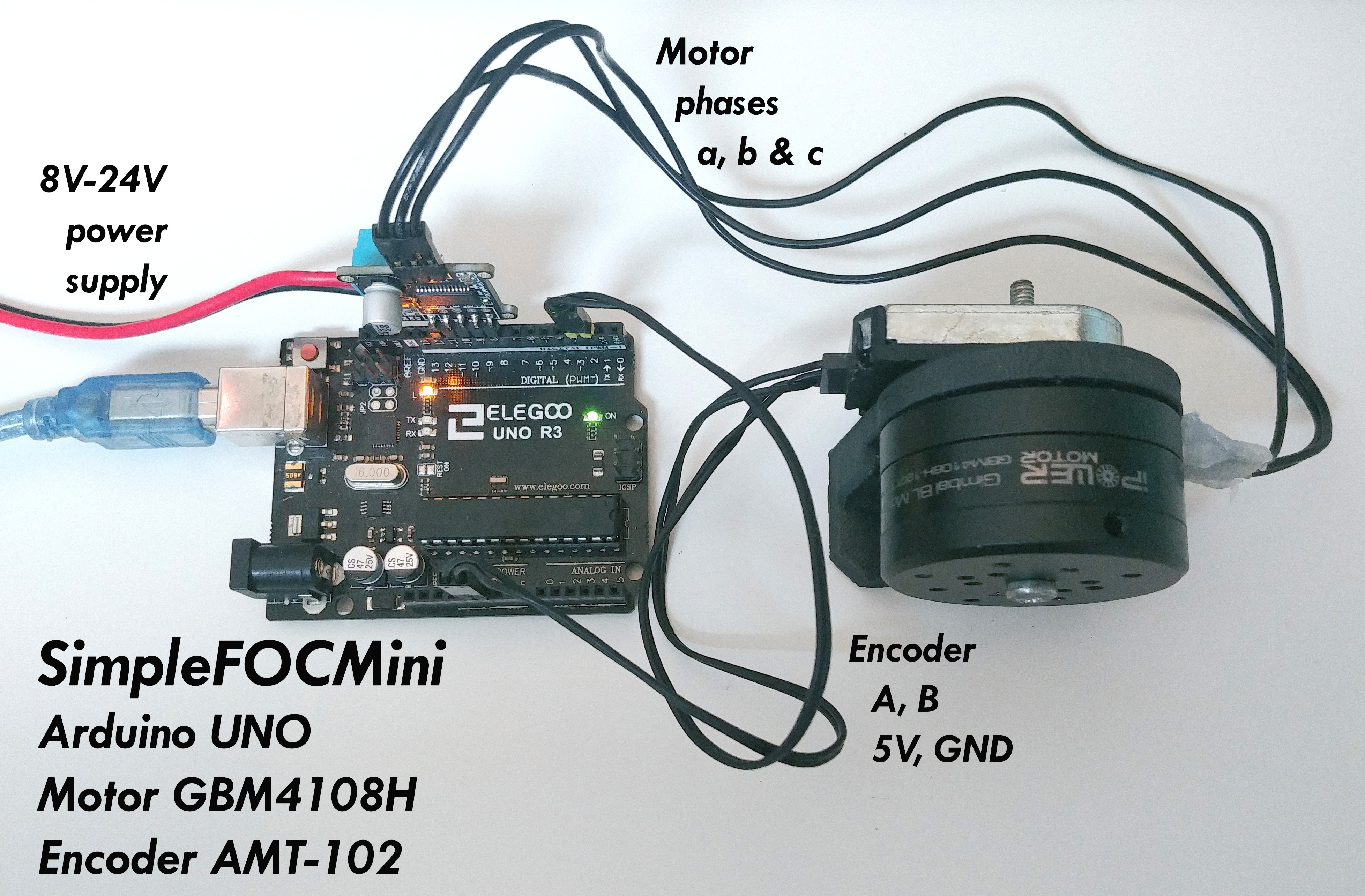
For more information about how to connect you hardware to your shield, check the full connection example.
Project example : Reaction wheel inverted pendulum
This is a project of designing and controlling the reaction wheel inverted pendulum based entirely on Arduino SimpleFOClibrary and SimpleFOCShield
This is a very fun project in many ways, and it is intended:
- Students in search for a good testing platform for their advanced algorithms
- Everyone with a bit of free time and a motivation to create something cool :D
For full documentation of necessary components, design choices and the code please visit the project docs.
📢 This project can be entirely done by using the SimpleFOCMini board.
Project example : Steer by wire - bidirectional haptic control examples
This video demonstrates SimpleFOCShield support for stacking with Arudino UNO and STM32 Nucleo-64 board. As well as support for different sensors magnetic and encoders with relatively large precision span.
The control algorithms implemented in this project are :
- Steer by wire (force feedback): two motors with virtually coupled positions
- Interactive gauge (haptic velocity control): two motors with virtually coupled position and velocity
For full documentation of the projects setup and the code please visit the project docs.
📢 This project can be entirely done by using the SimpleFOCMini board.
Getting started
You already have your own SimpleFOCMini?
Here is a simple guide how to start preparing your setup
How to get hold of the SimpleFOCMini
- Fabricate the board yourself: Please visit the board fabrication to find out how to manufacture the board yourself!
- Order the finished and tested board: Check out our shop.